
Цикл статей:
Глава 1 — Повышение эффективности функционирования железнодорожного переезда
Глава 2 — Разработка имитационной модели функционирования железнодорожного переезда
Глава 3 — Исследование безопасности движения поездов на железнодорожном переезде
Глава 4 — Измерение параметров движения поезда с помощью распределенных волоконно-оптических датчиков
Глава 5 — Разработка устройства управления АПС на основе параметров движения поезда
В данной главе проанализированы эксплуатационные вопросы применения распределенных волоконно-оптических датчиков в условиях железнодорожного транспорта. Выделены инструментальные средства обеспечения надежности и точности измерений. Предложено устройство управления АПС на основе измеряемой распределенными волоконно-оптическими датчиками информации о параметрах движения поезда на участке приближения к переезду.
Концепция обеспечения безопасности устройства управления переездной сигнализацией
В работе [19] обоснован вывод о том, что безопасность является свойством перевозочного процесса и характеризует степень функционирования устройств (систем) ЖАТ. При этом считается, что устройства (системы) ЖАТ безопасны, если процесс их функционирования (в том числе и переход в неисправное состояние) не создает угрозу жизням и здоровью пассажирам, техническому персоналу, обеспечивает сохранность грузов и технических средств транспортной системы [171, 172].
Для соответствия указанным выше условиям необходимо, чтобы в процессе эксплуатации функционирование устройств и систем ЖАТ удовлетворяло следующим свойствам:
- неисправности и отказы элементов устройств и систем ЖАТ должны явным образом обнаруживаться;
- необходимо обеспечить безопасное поведение системы при отказе;
- невозможность накопления отказов.
Поскольку системы управления устройствами переездной сигнализации относятся к классу изделий с функциями безопасности, во всех условиях и режимах эксплуатации должно обеспечиваться сохранение работоспособного и защитного состояния управляемых объектов [173].
Оптические распределенные датчики можно отнести к средствам измерения, поскольку устройство используется в качестве измерителя параметров движения поезда. На основе стандарта [174] к подобным измерительным устройствам должны предъявляться следующие требования:
- датчики должны обнаруживать эксплуатируемые на железных дорогах подвижные единицы в установленных диапазонах скоростей и возможных значений ускорения;
- не допускается пропадание сигнала от оптического распределенного датчика на время более 0,1 с;
- в процессе измерения скорости на контролируемом участке пути на работу оптической системы не должны оказывать влияние иные движущиеся вблизи объекты;
- погрешность измерения скорости должна быть не более 2 % во всем диапазоне измеряемых скоростей;
- любой отказ устройства обнаружения подвижного состава должен приводить к состоянию «участок пути занят».
Поэтому целесообразно поставленную в первой главе диссертационной работы задачу оптимизации (1.10) дополнить ограничениями, связанными с показателями безопасности функционирования и надежности системы.
Кроме того следует учитывать, что целесообразность применения новых систем управления устройствами АПС, которые соответствуют требованиям (1.10) и (5.1), обоснована только в том случае, если достигается абсолютная экономическая эффективность и если дополнительная экономия эксплуатационных расходов за счет увеличения пропускной способности участка и снижения аварийности на железнодорожных переездах окупит затраты на переоборудование и модернизацию устройств переездной сигнализации.
Концепция безопасности предлагаемого устройства управления АПС основана на использовании двухканального измерения и реализации двухканальной независимой обработки сигналов в параллельном режиме с последующим сравнением результатов вычислений. Поэтому при разработке устройства учитываются следующие принципы:
- аппаратное разделение оптических измерительных трактов;
- программный и аппаратный контроль функционирования и исправности каждого канала;
- увязка с объектами управления и контроля осуществляется с помощью схем с несимметричной характеристикой отказов;
- одиночные отказы аппаратных и программных средств не должны приводить к опасным отказам и должны обнаруживаться не позднее, чем в системе возникнет второй отказ.
Критерием опасного отказа устройства следует принять отсутствие поступления информации о параметрах приближающегося к переезду поезда от распределенного оптического датчика при фактической занятости участков пути.
В соответствии с изложенной концепцией схема и программное обеспечение должны проектироваться таким образом, чтобы опасный отказ был возможен только при одновременном отказе нескольких аппаратных или программных элементов.
Стоит отметить, что на системы с технологией мониторинга на основе распределенных оптических датчиков, имеются сертификаты соответствия технических средств обеспечения транспортной безопасности требованиям к их функциональным свойствам, например система «Дунай» производства компании «Т8».
Одним из методов повышения надежности технических систем является метод резервирования, при котором в систему предполагается включать разного уровня избыточность [176].
В литературе выделяются следующие методы резервирования оптических систем:
- линейное резервирование;
- построение кольцевых структур;
- системное резервирование.
Линейное резервирование достигается расширением числа оптических измерительных трактов, путем выделения отдельных световодов. При неисправности одного из тракта система будет осуществлять информационный обмен по резервному каналу.
Кольцевые структуры резервирования наиболее пригодны для построения волоконно-оптических сетей связи.
Системное резервирование предполагает применение в составе системы резервной приемо-передающей аппаратуры.
Обеспечение точности позиционирования объекта с помощью распределенных волоконно-оптических датчиков
Результаты измерений можно оценить путем сравнения с образцовой величиной. Разница между ними определяет точность измерительного прибора. Из-за того, что основными целями использования рефлектометра являются измерение уровней оптической мощности в различных точках волокна и определение местонахождения этих точек, то точность измерения связана со следующими параметрами:
- точность измерения затухания;
- точность измерения расстояния.
В научной литературе выделяют следующие причины ошибок измерении положения точек оптического волокна методами импульсной рефлектометрии:
- неверное определение начала и конца оптической линии;
- неточность величины группового показателя преломления волокна;
- ограниченная разрешающая способность рефлектометра.
Величины ошибки измерений методом импульсной рефлектометрии, по перечисленным выше причинам, указаны в таблице 5.1.
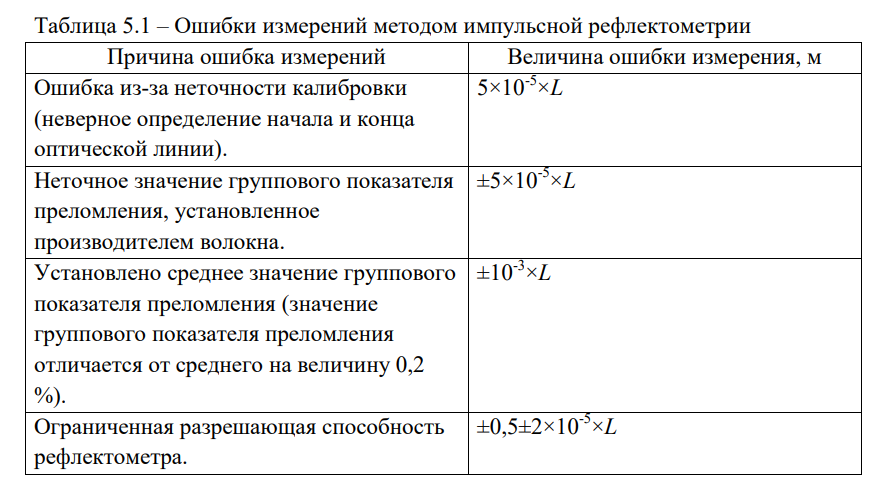
Таким образом, наибольшая величина ошибки измерений определяется пределом разрешающей способности рефлектометра [177].
С помощью методов импульсной рефлектометрии можно определить длину волокна от начала линии до места воздействия на сенсор с точностью порядка нескольких метров [133]. Тем не менее, измеренное значение длины волокна недостаточно для точного определения координат и местоположения вибрационных воздействий на контролируемом железнодорожном участке. Погрешность в определении места воздействия на волокно можно уменьшить, представив сигнал распределенного датчика как функцию длины
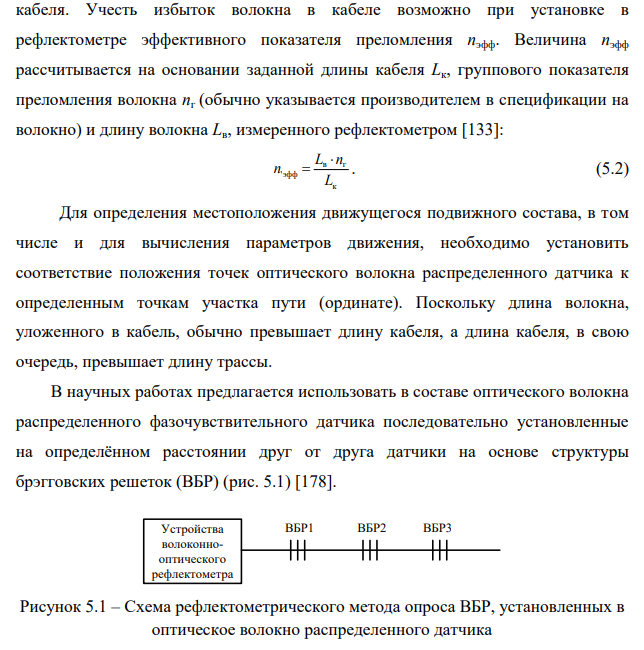
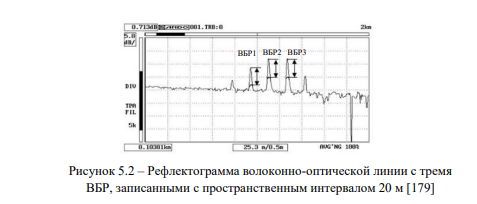
Данное решение позволяет уменьшить пространственное разрешение рефлектометра. Рефлектограмма оптической линии, с записанными тремя брэгговскими решетками, представлена на рисунке 5.2, при этом по положению характерных пиковых значений сигнала интенсивности рассеянного излучения устанавливается ордината точки датчика.
Недостатком подобных технических решений является необходимость на этапе изготовления чувствительного элемента распределенного датчика записывать брэгговские решетки в оптическое волокно [180]. Стоит отметить, что наличие в оптическом волокне большого числа ВБР вносит дополнительную нелинейность в измерительную систему, поэтому количество мультиплексируемых брэгговских решёток в одной оптической линии ограничено.
Привязку положения точек оптического волокна к местности можно произвести на этапе прокладки кабеля в грунт. Известен метод привязки за счёт кольцевой укладки кабеля (рис. 5.3) [181, 182] в местах опорных геодезических пунктов участка железнодорожного пути (пикетные столбы, светофоры и пр.).
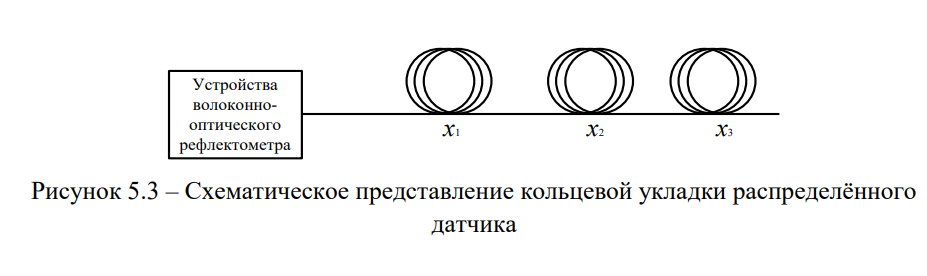
При этом в точках кольцевой укладки кабеля х 1, х2, х3 наблюдается повышение чувствительности к локальным воздействиям, а задержки сигнала в катушках оптоволокна заранее определяются с помощью измерительной установки, включающей эталонную аппаратуру для измерений интервалов времени [183]. Сигнал распределенного фазочувствительного датчика будет иметь также характерные точки повышенного значения интенсивности в соответствующих пространственных координатах оптического волокна.
Таким образом, при применении указанных выше методов представляется возможным корректировать и уточнять местоположение движущегося поезда по контролируемому участку.
Технология прокладки оптического сенсора распределенного датчика вдоль железнодорожного пути
Согласно проведенному исследованию японской компанией Sumitomo Electric Lightwave более 50% отказов волоконно-оптических кабелей, проложенных в грунте, приходится на обрыв при проведении земляных работ [184].
Однако расположение оптического волокна в грунт обеспечивает свободную укладку и защиту от прямого внешнего воздействия, при этом наблюдается уменьшение негативного старения и разрушения сердцевины оптического волокна под действием натяжения [185].
Прокладка оптического кабеля вдоль железнодорожного пути для применения в качестве чувствительного элемента распределенного датчика целесообразно осуществлять в грунт, аналогично способу прокладки традиционных медно—жильных кабелей связи, преимущественно с использованием кабелеукладчиков. Как правило, при прокладке используется оптический кабель, содержащий металлические конструктивные элементы только в виде бронепокровов [186]. Однако альтернативой прокладке бронированных оптических кабелей является прокладка оптического кабеля в защитных пластмассовых трубах [187], например прокладка с применением специализированных защитных полиэтиленовых труб (ЗПТ). При этом технология прокладки не изменяется.
Удобство применение ЗПТ заключается в возможности производить последующую прокладку оптических кабелей без проведения дополнительных земляных работ. При этом используются недорогие и легкие оптические кабели, без металлического бронирования, поскольку ЗПТ обеспечивает требуемую защиту.
Таким образом, указанная технология прокладки для волоконно-оптических линий связи применима и для организации распределенных оптических ИИС вдоль контролируемого железнодорожного участка.
Важным пунктом исследования является вопрос расположения оптического датчика в области нижнего строения железнодорожного пути.
На основании теоретических и экспериментальных исследований характера вибрационных возмущений от движущегося поезда [146], выявлено, что большая часть вертикальных виброперемещений грунта приходится на основную площадку рельсошпальной решетки. При этом наибольшие значения деформации, вне зависимости от материала шпал, типа подвижного состава, скорости движения поезда, зарегистрированы по оси балласта и вблизи рельсов (рис. 5.4).
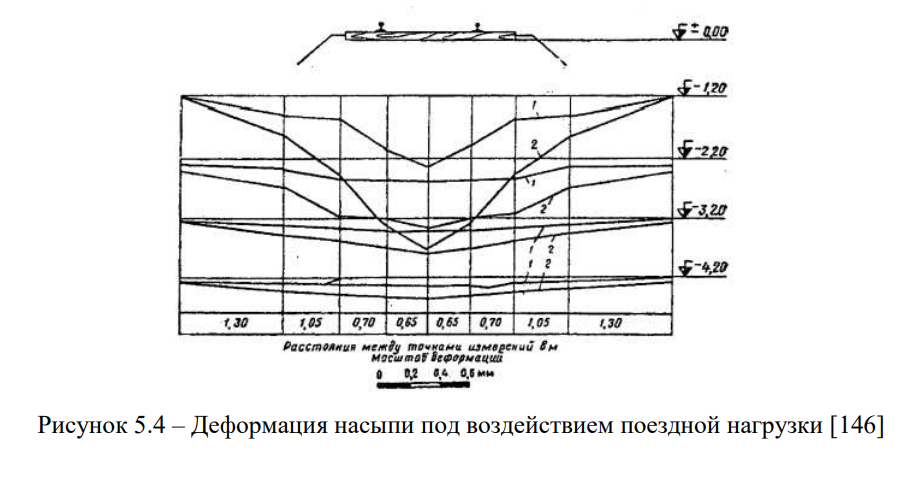
Поэтому при организации участков, контролируемых распределенными оптическими датчиками, целесообразно располагать оптические сенсоры в тело насыпи глубиной не более трёх метров от основания рельсошпальной решетки.
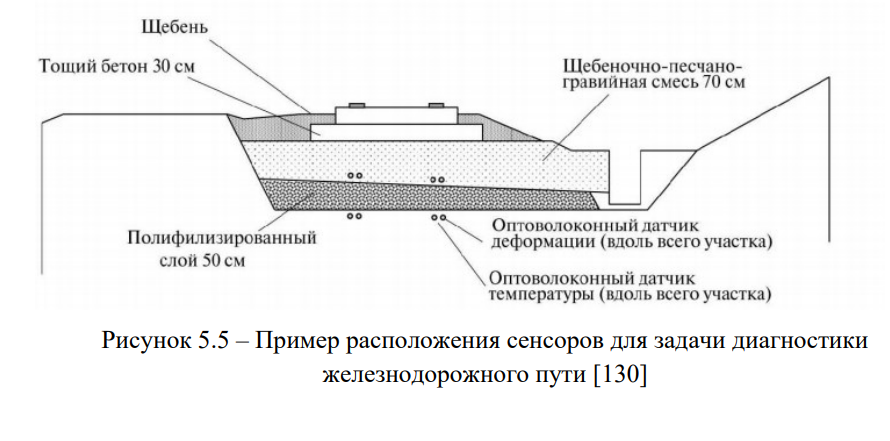
Данное предположение соотносится с результатами исследования, представленными в работе [130], в котором рассматривается применение распределенных датчиков вибрации для решения задач диагностирования перемещений железнодорожного пути (рис. 5.5).
Разработка структурно-функциональной схемы устройства управления АПС на основе параметров движения поезда
Данный раздел посвящен вопросам разработки устройства управления переездной сигнализацией на основе параметров движения поезда, измеряемых с помощью распределенного оптического датчика, расположенного на участке приближения к переезду [188].
При этом для обеспечения условий надежности измерений в составе аппаратуры устройства управления АПС включен дополнительный измерительный тракт волоконно-оптического датчика, расположенный на участке приближения к переезду с другой стороны железнодорожного пути [189].
На рисунке 5.6. представлена схема устройства управления системой автоматической переездной сигнализации.
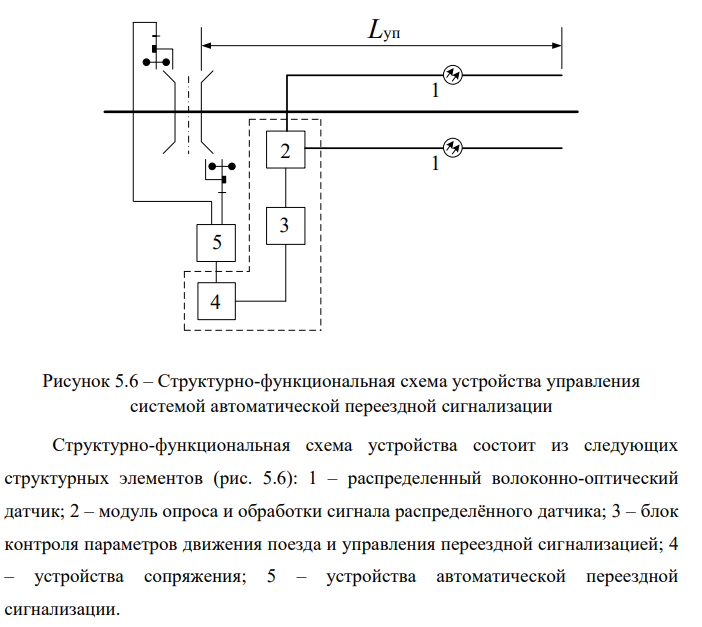
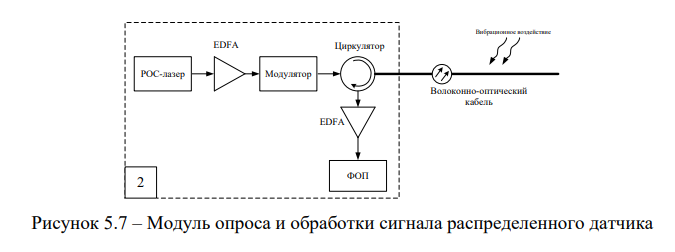
Устройство управления системой автоматической переездной сигнализации содержит два распределенных волоконно-оптических датчика, каждый из которых выполнен в виде заключенного в оболочку одномодового оптического световода. Волоконно-оптические датчики расположены в призме земляного полотна, вдоль контролируемых участков приближения к железнодорожному переезду Lуп., причем для возможности организации двух измерительных трактов один датчик расположен с одной стороны железнодорожного пути, а второй датчик — с другой стороны железнодорожного пути. Выходы распределенных волоконно-оптических датчиков 1 через модуль опроса 2 соединены с входом блока контроля параметров движения поезда и управления переездной сигнализацией 3. Модуль опроса (рис. 5.7) содержит источник последовательных коротких импульсов и приемник рассеянного сигнала и предназначен для приема информации от распределенного волоконно-оптического датчика 1.
Устройства автоматической переездной сигнализации 5, в том числе переездные светофоры, шлагбаумы, УЗП подключены к выходу устройства сопряжения 4, вход которого соединен с выходом блока контроля параметров движения поезда и управления переездной сигнализацией 3. Устройство сопряжения 4 предназначено для управления исполнительными реле устройств переездной сигнализации 5 по командам, формируемым блоком контроля параметров движения поезда и управления переездной сигнализацией 3, и передачи информации о состоянии объектов управления.
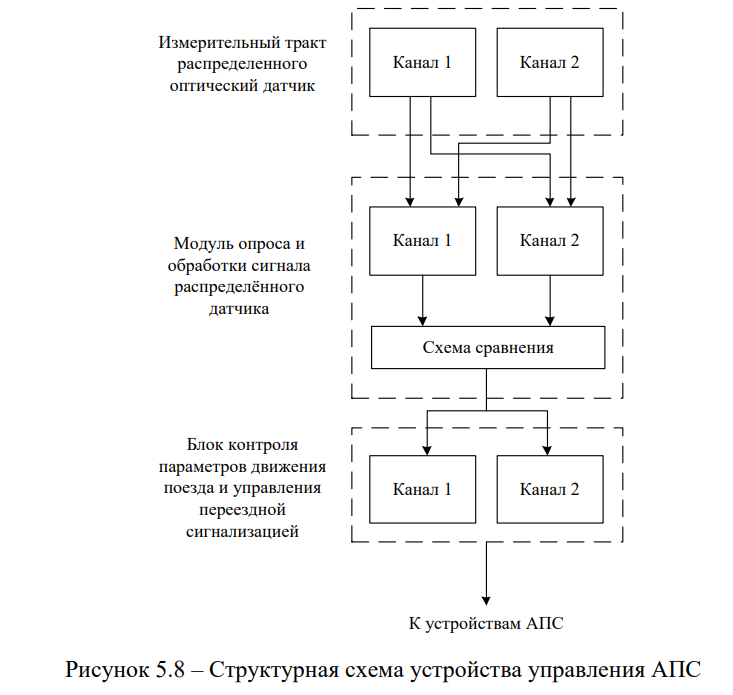
В модуле опроса и обработки сигнала осуществляется параллельное вычисление в двух идентичных каналах (рис. 5.8) и сравнение полученных данных сигнала распределенного оптического датчика. При успешном результате сравнения данные поступают в блок контроля параметров движения и управления переездной сигнализации. В случае если обработанные данные рефлектограмм двух измерительных каналов отличаются, снимается питание с управляющих объектов, подключенных к блоку контроля и управления, а устройство управления АПС переводится в необратимое защитное состояние.
В состав блока контроля и управления входит вычислительная система, осуществляющая вычисление, хранение и прогнозирование параметров движения движущегося по участку приближения к переезду подвижной единицы, и подачи управляющей команды на устройство сопряжения с объектами, к выходу которого подключено управляющее реле (реле У) и контакты реле контролируемых состояние устройств АПС. Указанные модули имеют «горячий» резерв: в активном комплекте осуществляются вычисления и управления объектами, в пассивном комплекте контролируется работоспособность активного комплекта. В случае неисправности активного комплекта пассивные модули автоматически переходят в активное состояние без нарушения работы устройства.
В основе функционирования устройства лежит принцип непрерывного определения скорости и ускорения движения поезда на участке приближения к переезду [190], благодаря чему достигается минимальное возможное (по условиям безопасности) значение длительности закрытого состояния переезда. При этом применяются методы регистрации и обработки оптического интерференционного рассеянного сигнала, вызванного вибрационным возмущением чувствительного световода распределенного волоконнооптического датчика (рис. 5.9).
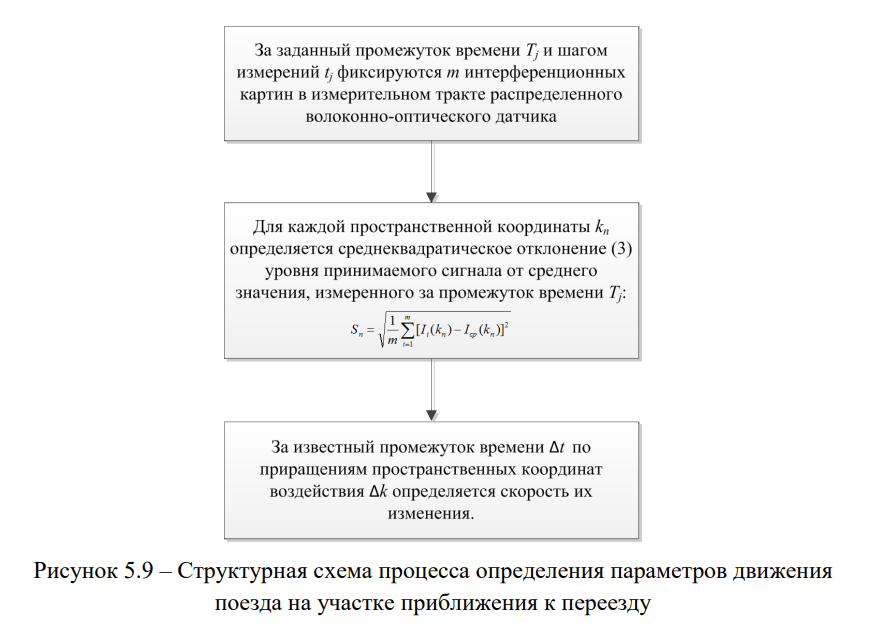
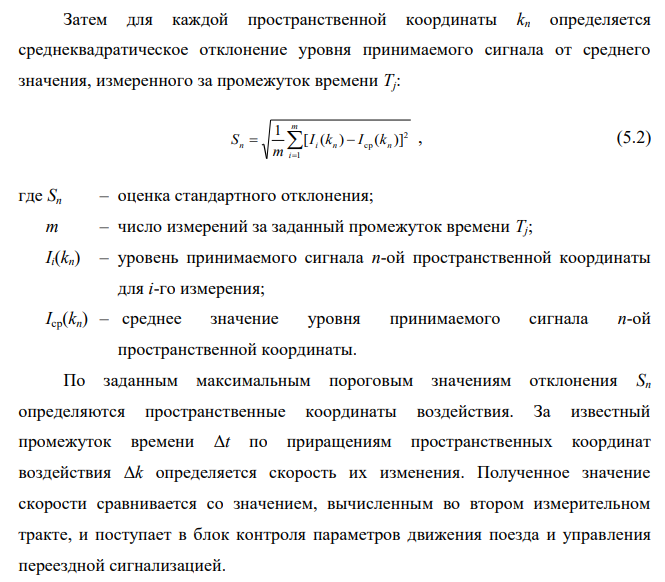
При приближении поезда по участку извещения к переезду воздействия динамических нагрузок от подвижного состава на элементы верхнего строения пути локально влияют на изменение показателя преломления распределенного волоконно-оптического датчика. При этом на выходе распределенного волоконно-оптического датчика приемником регистрируется интерференционная картина: зависимость интенсивности рассеянного сигнала от пространственной координаты распределенного датчика. В модуле опроса блоком приема и обработки сигнала за заданный промежуток времени Т и шагом измерений фиксируются т интерференционных картин каждого измерительного тракта.
Блок контроля параметров движения поезда и управления переездной сигнализацией сохраняет и анализирует информацию заданного числа фиксируемых подряд значений, а затем формирует данные о параметрах приближающегося к переезду подвижного состава в режиме реального времени. На основе полученных данных формируются команды управления устройствами автоматической переездной сигнализации согласно следующей логике работы системы:
На следующем этапе контролируется положение головы поезда и расстояние до переезда с учетом длины прогнозного участка извещения. В случае достижения головой поезда начала прогнозного участка извещения формируется команда управления устройствами АПС на закрытие переезда.
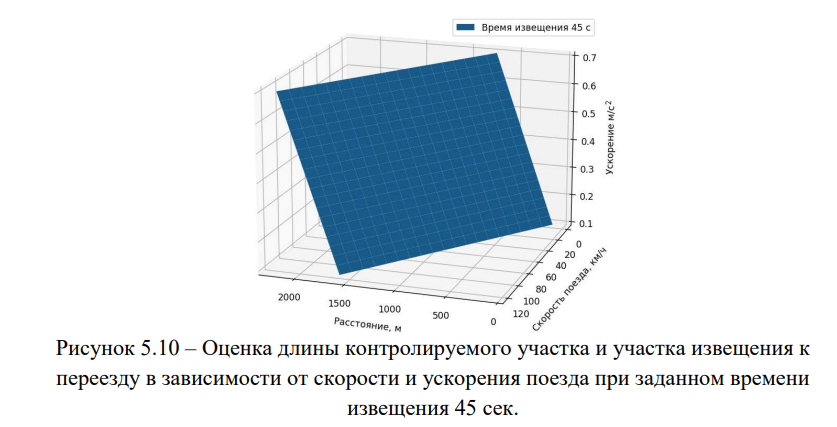
Вместе с тем представляется возможным оценивать корректность расчетов прогнозного участка извещения на основе сравнения фактического пройденного расстояния поездом за текущий цикл измерения со спрогнозированным расстоянием, вычисленным на основе прогнозных параметров движения поезда на предыдущем цикле измерения. Зависимость длины контролируемого участка и прогнозного участка извещения от переменных скорости и ускорения поезда можно представить в виде плоскости в трехмерном пространстве при заданном значении времени извещения (рис. 5.10)
Основные технические и эксплуатационные характеристики подвижных
составов, в частности максимальная скорость и ускорение при эксплуатации, установлены техническими требованиями. На основе эксплуатационных требований и максимальных установленных на участке характеристик движения поездов определяется критическая длина участка извещения к переезду, исходя из условий минимального времени разгона поезда с учетом максимального постоянного пускового ускорения. Множество достижимых значений длин участка извещения при заданном времени извещения 45 секунд можно представить графически в виде некоторой области (рис. 5.11).
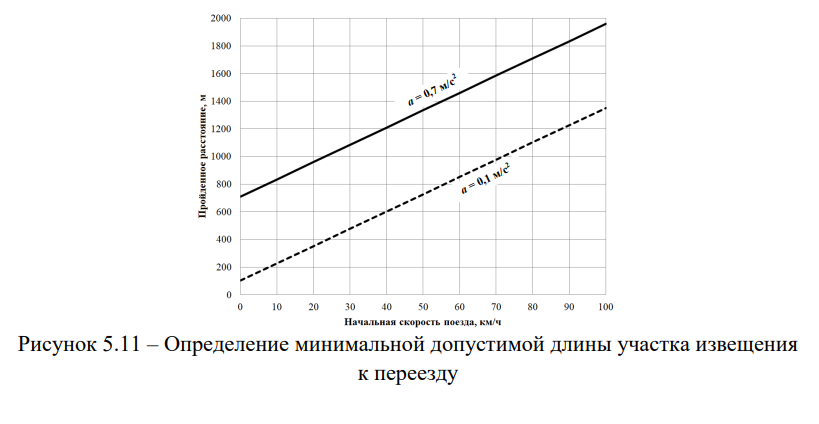
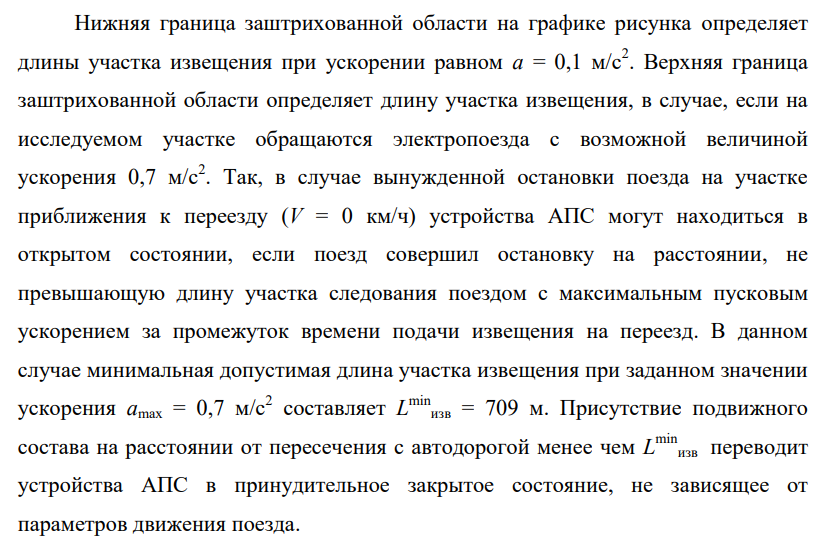
Нарушение указанного требования приводит к нарушению условий проезда автотранспортных средств, поскольку время следования поезда от места остановки до пересечения с автодорогой может быть меньше времени проезда автотранспортного средства через переезд.
Управление устройствами автоматической переездной сигнализации осуществляется с помощью устройства сопряжения. Устройство сопряжения также обеспечивает формирование и передачу информации о состоянии устройств переезда в блок контроля параметров движения поезда и управления переездной сигнализацией.
Устройство может применяться как на существующих, так и на вновь сооружаемых перегонных и станционных переездах, находящихся на железнодорожных путях общего и необщего пользования. Пример изменений, вносимых в существующую релейную схему включения извещения на переезд, основанную на типовых материалах для проектирования переездной сигнализации на перегонах [194], при модернизации устройств управления АПС приведена на рисунке 5.12.
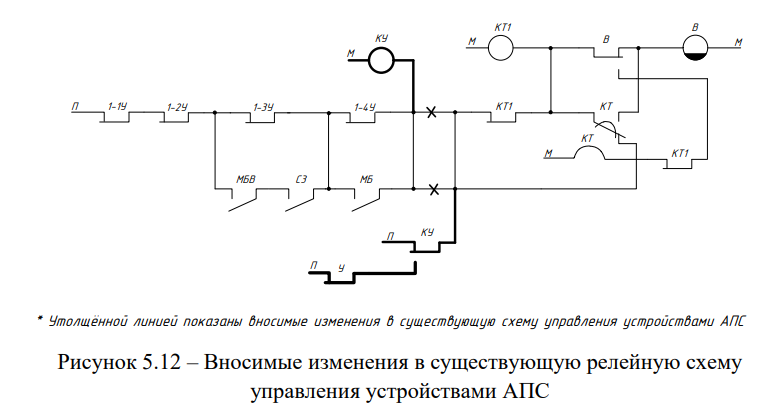
Вновь добавляемые реле в схему включающего реле:
- реле У — управляющее реле блока контроля параметров движения поезда и управления переездной сигнализацией; Включенное состояние реле У поддерживается системой управления АПС на основе измеряемой распределенными волоконно-оптическими датчиками информации о параметрах движения поезда на участке приближения к переезду;
- реле КУ — управляющее реле контроля занятости участков приближения к переезду; Выступает в качестве общего повторителя реле контроля свободности участков приближения и блокирующих реле МБВ, МБ.
При отсутствии поезда на участке приближения к переезду реле 1-1У, 1-2У, 1-3У, 1-4У находятся под током и обеспечивают включенное состояние реле КУ. Через контакты включенного реле КУ находятся под током реле КТ1 и В — переезд открыт.
Выводы по главе
- Сформулированы ограничения, связанные с показателями безопасности функционирования и надежности систем управления АПС на основе информации о параметрах движения поезда. При этом сокращение времени длительности закрытого состояния переезда возможно только при условии, что интенсивность отказов устройств управления АПС должна быть меньше 10-5 1/ч, а интенсивность опасных отказов систем не должна превышать значения 10-9 1/ч. На основе указанных ограничений предложена концепция безопасности предлагаемого устройства управления переездной сигнализацией.
- Предложен способ привязки точек распределенного оптического датчика к ординате пути на основе характерных изменений сигнала рефлектометра. Установка в оптическую линию брэгговских решеток, а также кольцевая укладка кабеля в местах опорных геодезических пунктов участка железнодорожного пути (пикетные столбы, светофоры и пр.) позволяет определять и корректировать местоположение движущегося поезда по контролируемому участку.
- Рассмотрен вопрос расположения оптического датчика в области нижнего строения железнодорожного пути. Выявлено, что наибольшее значение деформации нижнего строения пути при движении подвижного состава наблюдается под рельсошпальной решеткой по оси колеи. Поэтому, целесообразно при организации участков, контролируемых распределенными оптическими датчиками, располагать оптические сенсоры в тело насыпи глубиной не более трёх метров от основания рельсошпальной решетки.
- Предложена структурно-функциональная схема устройства управления АПС на основе информации о параметрах движения поезда на участке приближения к переезду. Измерение параметров осуществляется с помощью оптического распределенного датчика, укладываемого на протяжении контролируемого участка. Технический результат предлагаемого устройства заключается в сокращении длительности закрытого состояния переезда.
Заключение
В данной диссертационной работе изложены новые научно-обоснованные технико-технологические и методические решения, в области совершенствования систем управления автоматической переездной сигнализацией, имеющие существенное значение для развития страны. Решение поставленных в работе задач позволяет повысить эффективность функционирования железнодорожного переезда и принять меры по обеспечению безопасности перевозочного процесса в условиях высокой интенсивности движения поездов с учетом экономической целесообразности.
В результате выполненных практических и теоретических исследований по теме работы получены следующие научные и практические результаты:
- На основе анализа существующих подходов к расчету параметров работы устройств переездной сигнализации определена необходимость в исследовании функционирования железнодорожного переезда. Показано, что на сегодняшний день системы автоматической переездной сигнализации на сети железных дорог не позволяют обеспечить минимальных значений временных зависимостей при подаче извещения на переезд.
- Разработана математическая модель работы железнодорожного переезда, основанная на имитационном моделировании. Модель позволяет определить время пребывания переезда в закрытом состоянии на основе данных о размерах и параметрах движения поездов на исследуемом участке. Научно обосновано, что при управлении устройствами АПС на основе параметров движения поезда достигается сокращение длительности закрытого состояния переезда.
- Разработанная стохастическая модель функционирования железнодорожного переезда, реализованная в виде сети Петри, позволяет оценить безопасность движения поездов на конкретном переезде. Преимущество предлагаемого подхода в возможности исследования вероятности возникновения опасного состояния движения поездов на переезде в зависимости от характеристик транспортных потоков и параметров работы АПС.
Перспективы дальнейшей разработки темы исследования включают в себя такие аспекты, как:
- Разработка имитационной модели функционирования станционного железнодорожного переезда с целью определения направления совершенствования принципов управления системой АПС.
- Оценка точности определения характеристик движения поезда на основе сигнала от распределенного оптического датчика, расположенного на участке приближения к переезду.
Список литературы
- Тонози, О. Модель волоконного фазочувствительного рефлектометра и ее сравнение с эксперементом / О. Тонози, С. Б. Аксенов, Е. В. Подивилов, С. А. Бабин // Квантовая электроника. – 2010. – № 10. – C. 887-892.
- Алексеев, А. Э.. Волоконная интерферометрия рассеянного излучения и ее применение для регистрации акустических воздействий: диссертация … кандидата физико-математических наук: 01.04.03 / Алексеев Алексей Эдуардович;[Место защиты: Институт радиотехники и электроники им. В. А. Котельникова РАН].- Москва, 2013.- 282 с.
- Жирнов, А. А. Фазочувствительный рефлектометр на основе перестраиваемого по частоте излучения твердотельного иттербий-эрбиевого лазера : автореферат дис. … кандидата технических наук : 05.11.07 / Жирнов Андрей Андреевич; [Место защиты: Моск. гос. техн. ун-т им. Н.Э. Баумана]. — Москва, 2019. — 16 с.
- Алексеев, А. Э. Статистические свойства интенсивности частично поляризованного, обратнорассеянного одномодовым оптическим волокном излучения полупроводниковых лазерных источников / А. Э. Алексеев, Б.Г.Горшков, В.Т.Потапов // Квантовая электроника. – 2015. – № 8 (45). – C. 748–
- Коншин, Г.Г. Упругие деформации и вибрации земляного полотна; Учебное пособие. — М.: МИИТ, 2010. -180с.
- Смолин, Ю.П. Прочность железнодорожных насыпей, сложенных мелкозернистыми и пылеватыми песками, воспринимающими динамическое воздействие от подвижного состава : дис. … докт. техн. наук: 05.22.06. – СПб. : ПГУПС, 2005. – 272 с.
- Ашпиз, Е. С. Железнодорожный путь : Учебник / Е. С. Ашпиз, А.И. Гасанов, Б.Э. Глюзберг и др.. – М. : ФГБОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2013. – 544 с.
- Востриков, К. В. К вопросу о границе санитарно-защитной зоны от вибрационного воздействия транспорта / К. В. Востриков, Ю.П. Смолин // Вестник Томского государственного архитектурно-строительного университета. – № 1. – C. 163-172.
- Галинуров, Р. З. Исследование воздействия вибрации подвижного состава на сигнал распределенного оптического датчика с помощью численного моделирования/ Р. З. Галинуров // Транспорт Урала. – 2021. – № 2 (69). – C. 101-
- Юлдашев, Ш. С. Распространение вибраций в грунтах, возникающих при движении железнодорожных поездов / Ш. С. Юлдашев, С.М. Саидов, М.Я. Набиев // Молодой ученый . – 2015. – № 11 (91). – C. 481-483.
- Alekseev, A. E. Dual-pulse phase-OTDR response to propagating longitudinal disturbance / A. E. Alekseev, B. G. Gorshkov , V. T. Potapov, M. A. Taranov, D. E. Simikin // Laser Physics. – 2020. – № 30. – C. 1-10.
- Ali Masoudi. Analysis of distributed optical fibre acoustic sensors through
numerical modelling / Ali Masoudi, Trevor P. Newson // Optics express. – 2017. – № – C. 32021-32040. - Алексеев, А. Е. Статистика интенсивности обратно-рассеянного излучения полупроводникового лазера в одномодовом оптическом волокне / А. Е. Алексеев, Я. А. Тезадов, В. Т. Потапов // Письма в ЖТФ. – 2012. – № 2. – C. 74-81.
- Gysel, P. Statistical properties of Rayleigh backscattering in single-mode fibers / P. Gysel, R. K. Staubli // Journal of Lightwave Technology. – 1990. – vol. 8, № 4 – P. 561-567.
- Алексеев, А. Э. Статистические свойства обратнорассеянного излучения полупроводниковых лазеров с различной степенью когерентности / А. Э. Алексеев, Я. А. Тезадов, В. Т. Потапов // Квантовая электроника. – 2012. – т. 42, № 1 . – C. 76-81.
- Distributed Vibration Sensor Based on Coherent Detection of Phase-OTDR / Y. Lu, T. Zhu, L. Chen, X. Bao // Journal of Lightwave Technology. 2010. No. 22. Pp. 3243–3249.
- Горшков, Б. Г. Распределенный датчик внешнего воздействия на
основе фазочувствительного волоконного рефлектометра / Б. Г. Горшков, В. М.
Парамонов, А. С. Курков и др. // Квантовая электроника. – 2006. – № 10. С. 963– ISSN 0368-7147. - Distributed fiber-optic intrusion sensor system / J. C. Juarez, E. W. Maier, K. N. Choi, H. F. Taylor // J. Lightwave Technol. 2005. No. 23(6).
- Choi K. N., Juarez J. C., Taylor H. F. Distributed fiber optic pressure/seismic sensor for low-cost monitoring of long perimeters // AeroSense 2003. International Society for Optics and Photonics. 2003. Pp. 134–141.
- Papp A., Wiesmey C. Train detection and tracking in optical time domain reflectometry (OTDR) signals //pLecture Notes in Computer Science. 2016. No. 9796. Pp. 320–331.
- Kong, H., Zhou, Q., Xie, W., Dong, Y., Ma, C., & Hu, W. (2014). Events Detection in OTDR data based on a method combining Correlation Matching with STFT. Asia Communications and Photonics Conference 2014. doi:10.1364/acpc.2014.ath3a.148.
- Real-time position and speed monitoring of trains using phase-sensitive OTDR / F. Peng, N. Duan, Y. J. Rao, J. Li // IEEE Photonics Technol. Lett. 2014. No. 26 (20). Pp. 2055–2057.
- Qin Z., Chen L., Bao X. Wavelet denoising method for improving detection performance of distributed vibration sensor // IEEE Photonics Technol. Lett. No. 24 (7). Pp. 542–544.
- Ильин, В. А. Математический анализ. Начальный курс / В. А. Ильин, В. А. Садовничий, Бл. Х. Сендов; под ред. А. Н. Тихонова,— 2-е изд., перераб., — М.: Изд-во МГУ, 1985. — 662 с.
- Сато Юкио. Обработка сигналов. Первое знакомство : книга / Сато Юкио. – М. : Додека XXI, 2002. – 176 с.
- Иванов, Д.С. Алгоритм оценки параметров ориентации малого космического аппарата с использованием фильтра Калмана [Электронный ресурс] / Д.С. Иванов, С.О. Карпенко, М.Ю. Овчинников // Препринты ИПМ им. М.В.Келдыша. – 2009. – № 48. – Режим доступа: http://library.keldysh.ru/preprint.asp?id=2009-48.
- Манонина, И. В. Методика обработки данных измерений параметров линий связи с применением вейвлет-анализа к рефлектометрическим измерениям : автореферат дис. … кандидата технических наук : 05.12.13 / Манонина Ирина
Владимировна; [Место защиты: Моск. техн. ун-т связи и информатики]. — Москва,- 26 с. - Бусурин, В. И. Ограничение точности измерения потерь излучения в одномодовых волокнах: «вмороженные» неоднородности коэффициента обратного рэлеевского рассеяния / В. И. Бусурин, Б. Г. Горшков, Г. Б. Горшков, М. Л. Гринштейн, М. А. Таранов // Квантовая электроника. – 2017. – №1(47) – С. 83 – 86.
- Семин, А. В. Разработка и исследование рефлектометрических методов контроля волоконно-оптических направляющих систем связи в процессе их строительства и эксплуатации : автореферат дис. … кандидата технических наук : 05.12.13 / С.-Петерб. гос. ун-т телекоммуникаций им. М.А. Бонч-Бруевича. – Санкт-Петербург, 2004. – 17 с.
- Журавлев, И.А. Управление надежностью функционирования систем железнодорожной автоматики и телемеханики по экономическому критерию / А.В. Горелик, И.А. Журавлев, П.А. Неваров // Экономика железных дорог. – 2011.
– №3. – С.60 – 69. - Безродный, Б. Ф. Принципы управления надежностью систем
железнодорожной автоматики и телемеханики / Б.Ф. Безродный., А.В. Горелик,
Д.В. Шалягин, П.А. Неваров //Автоматика, связь, информатика. – 2008. – №7. – С.
13 – 14. - ГОСТ 34012 — 2016. Аппаратура железнодорожной автоматики и телемеханики. Общие технические требования : Межгосударственный стандарт. – М. : Стандартинформ, 2017. – 50 с.
- СТО РЖД 1.19.008-2009. Системы и устройства железнодорожной автоматики и телемеханики сортировочных станций. Технические требования : Стандарт ОАО «РЖД» – М. : ОАО «РЖД», 2009. – 40 с.
- ГОСТ Р МЭК 61508-1 — 2007. Функциональная безопасность систем электрических, электронных, программируемых электронных, связанных с безопасностью. Общие требования. – М. : Стандартинформ, 2008. – 44 с.
- Новиков, Е. В. Методы анализа надежности сложных технических систем с временной избыточностью инфраструктуры железнодорожного транспорта : авторев. дисс. … канд. техн. наук : 05.13.01 / Новиков Евгений Владимирович. – М., 2012. – 24 c.
- Воронин, В. Г. Оптический рефлектометр : учебное пособие / В. Г. Воронин, О.Е. Наний, А.А. Кулик, А.Н. Туркин. – М. : МГУ им М.В. Ломоносова, – 18 с.
- Пат. 2682523 Российская Федерация, СПК B61L 1/166, G01L 1/246. Оптическое устройство для контроля заполнения пути / Баяндурова А. А.; заявитель и патентообладатель АО «НИИАС». – № 2018122514; заявл. 21.06.2018; опубл. 19.03.2019, Бюл. № 8. – 9 с.
- Шелемба, И. С. Методы опроса распределенных волоконно-оптических измерительных систем и их практическое применение : автореферат дис. … кандидата технических наук : 01.04.05 / Шелемба Иван Сергеевич; [Место защиты: Ин-т автоматики и электрометрии СО РАН]. — Новосибирск, 2018. — 24 с.
- Куликов, А. В. Волоконно-оптические акустические сенсоры на брэгговских решетках : диссертация … кандидата технических наук : 05.11.01 / Куликов Андрей Владимирович; [Место защиты: С.-Петерб. нац. исслед. ун-т
информац. технологий, механики и оптики]. – Санкт-Петербург, 2012.– 144 с. - Степанов, К. В. Волоконно-оптическая сенсорная система с повышенной акустической чувствительностью на основе фазочувствительного рефлектометра : авторев. дисс. … канд. тех наук : 05.11.07 / Степанов Константин Викторович . – М., 2021. – 17 c.
- Колмогоров, О.В. Уменьшение погрешности измерений задержек распространения сигнала с помощью оптического рефлектометра с пикосекундным разрешением / О.В. Колмогоров, А.Н. Щипунов, О.В. Денисенко, С.С. Донченко, Д.В. Прохоров, С.Г. Буев, Е.В. Чемесова // Измерительная
техника. – 2020. – № 1. – С. 30 – 34. - Колмогоров, О.В. Установка для измерений задержек распространения сигналов в оптических элементах / О.В. Колмогоров, А.В. Дейкун, Е.В. Чемесова. Установка для измерений задержек распространения сигналов в оптических элементах // Альманах современной метрологии. – 2020. – № 1(21). – С. 126 – 135.
- V. Hou, ―Update on Interim Results of Fiber Optic System Field Failure Analysis‖, NFOEC Proceedings Vol. 1, p. 539-545, (1991); Rados, I., Sunaric, T., & Turalija, P. (n.d.). Suggestions for availability improvement of optical cables. ICCSC’02. 1st IEEE International Conference on Circuits and Systems for Communications. Proceedings (IEEE Cat. No.02EX605). doi:10.1109/occsc.2002.1029086.
- Ситнов, Н. Ю. Исследование методов ранней диагностики волоконно-оптических линий передачи : автореферат дис. … кандидата технических наук : 05.12.13 / Ситнов Николай Юрьевич; [Место защиты: Сиб. гос. ун-т телекоммуникаций и информатики]. – Новосибирск, 2011. — 24 с.
- Технологии строительства ВОЛП. Оптические кабели и волокна: Учебное пособие для вузов / В.А. Андреев, Р.В. Андреев, А.В. Бурдин, В. А. Бурдин, М. В. Дашков, Б. В. Попов, В.Б. Попов / под редакцией В.А. Андреева – Самара : СРТТЦ ПГУТИ, 2016. – 369с.
- Ефанов, В. И. Проектирование, строительство и эксплуатация ВОЛС: учебное пособие / В. И. Ефанов. – Томск: Томск. гос. ун-т систем упр. и радиоэлектроники, 2012. – 102 с.
- Галинуров, Р. З. Применение оптоволоконных технологий для контроля объектов железнодорожной инфраструктуры / Р. З. Галинуров, А. Н. Попов // Информационные технологии и когнитивная электросвязь : Материалы V Межвузовского научного семинара. – Екатеринбург: типография УрТИСИ
СибГУТИ, 2019. – C. 103-105. - Пат. 2732685 Российская Федерация, МПК В61L 29/24 (2006.01). Устройство управления системой автоматической переездной сигнализации / Попов А. Н., Галинуров Р. З. ; заявитель и патентообладатель ФГБОУ ВО
УрГУПС. – № 2019126243 ; опубл. 21.09.2020, Бюл. № 27. - Галинуров, Р. З. Измерение скорости подвижного состава с помощью распределенного волоконно-оптического датчика / Р. З. Галинуров, А. Н. Попов // Материалы XII Международной научно-практической конференции «Наука и
образование транспорту». – Самара : СамГУПС, 2019. – № 1. – C. 314-318. - ГОСТ Р 55434-2013. Электропоезда. Общие технические требования : Национальный стандарт. – М. : Стандартинформ, 2014. – 61 с.
- Корнев, А. С. Новые электропоезда с тяговым электроприводом постоянного тока / А. С. Корнев, А. Я. Якушев, В. О. Иващенко, Б. Ю. Левитский, О. К. Чандер // Известия Петербургского университета путей сообщения. – 2004. – № 2. – C. 51-55.
- Якушев, А. Я. Совершенствование системы управления
электропоездами / А. Я. Якушев // Транспорт Российской Федерации. Журнал о
науке, практике, экономике. – 2012. – № 2 (39). – С. 48-51. - 410407-ТМП. Типовые материалы для проектирования. Схемы переездной сигнализации для переездов, расположенных на перегонах при любых средствах сигнализации и связи АПС-04. Альбом 1. Переездная сигнализация на перегонах с автоблокировкой. – М.: ГУП ГИПРОТРАНССИГНАЛСВЯЗЬ, 2004. – 143 с.