
Цикл статей:
Глава 1 — Повышение безопасности на железнодорожных переездах на основе совершенствования управления автоматической переездной сигнализацией
Глава 2 — Мероприятия по повышению безопасности и снижению аварийности на железнодорожных переездах
Глава 3 — Разработка и исследование системы информативных признаков координаты поезда
Глава 4 — Разработка вычислителя координаты и скорости поезда с корректирующим алгоритмом
Успешное решение задачи повышения пропускной способности и безопасности на железнодорожных переездах становится возможным, если подойти к проблеме с позиций комплексного решения вопроса функционирования системы железнодорожной АПС, с учетом излишнего простоя АТС у закрытых переездов из-за медленно движущихся поездов [47]. Управление АПС на переезде при этом необходимо осуществлять с учетом координаты и скорости поезда с соответствующим методом и алгоритмом регулирования. Этот принцип положен в основу разработки интеллектуальной «дружелюбной» системы управления АПС железнодорожных переездов в направлениях:
- расширения их функциональных возможностей посредством адаптивного управления устройствами ограждения на основе учета скорости поезда на УП к переезду с корректирующим алгоритмом, что позволяет сократить простой автотранспорта перед переездом, и, следовательно, повысить безопасность на переездах;
- повышения информированности водителей автотранспорта, использованием специальных информационных табло и дополнительных сигнальных приборов на переездах.
Координату и скорость поезда на УП к переезду можно вычислить, используя уравнение координаты поезда = /(X), с помощью информации непрерывно изменяющегося множества информативных признаков, зависящих от координаты поезда на УП к переезду и являющихся аргументами в уравнении, по значению которого определяется координата, текущая, поезда [48]. Если известна разность координат, пройденных поездом за фиксированное время, заданное таймером, то скорость определяется как:
Очевидно, чем меньше промежуток времени дискретизации, тем более точно и почти непрерывно определяется скорость и корректируется время закрытия переезда, минимизируя простой автотранспорта.
Вместе с тем в представленном принципе обязательным условием является точность результатов вычисления координаты поездов, вступивших на участок приближения и каждый раз находящихся на одной и той же координате. Данное условие реализуемо обеспечением инвариантности информативных признаков к изменению параметров датчика. Вследствие того, что в качестве датчика информации используется рельсовая цепь, у которой информационные параметры зависят от первичных параметров РЛ и сопротивлений по концам РЛ, обеспечить инвариантность невозможно, поэтому необходима подстройка (корректировка) вида и сложности уравнения координаты поезда. То есть каждый раз при вступлении поезда на участок приближения необходима корректировка уравнения, иначе появляется ошибка, которая увеличивается со временем. Скорость при ошибочной координате вычисленная неточная, и это приводит к ошибочному определению фактического времени закрытия переезда и нарушению БДП. Поэтому работа по повышению точности вычисления координаты поезда актуальна, необходимо сформировать и исследовать систему информативных признаков координаты поезда.
Разработка структурной схемы датчика координаты поезда
Датчик определения координаты нахождения поезда на УП относится к устройствам обеспечения безопасности движения поездов, он должен обладать специфическими свойствами, к которым относятся:
- повышенная точность вычисления координаты поезда;
- инвариантность вычисленной координаты поезда к возмущающим факторам
- изменению первичных параметров РЦ УП к переезду;
- обеспечение требуемого быстродействия измерения значений первичных информативных признаков и вычисления координаты поезда.
В настоящее время известно устройство определения координат поезда, обеспечивающее управление автоматическим движением на ЖДП, позволяющее переезд закрывать в зависимости от координаты места поезда, его скорости и ускорения [49-53].
По данному решению рядом с РЛ на УП на определенном расстоянии установлены метки пассивные с координатами фиксированными, и каждая метка имеет идентификационный номер отличный от всех других, а на локомотиве установлено соответствующее считывающее устройство, подключенное к контроллеру бортового вычислительно-управляющего устройства. К контроллеру также подключен датчик определения скорости локомотива. В устройстве выключение и включение АПС осуществляется посредством воздействия поезда на РЦ и устройства счета осей (УСО), выполняемого двумя и более датчиками фиксации воздействия колесных пар поездов. РЦ непрерывно контролируют
нахождение на РЛ поезда, приближающегося к переезду, а УСО фиксируют моменты освобождения УП непосредственно за переездом для сокращения времени открытия переезда после прохода поезда и отсутствия приближения к переезду поезда смежного блок-участка.
Данному устройству присуще несовершенство, выраженное в недостаточной длине РЦ УП и в уменьшении надежности работы устройства с увеличением длины УП.
Другой разновидностью системы определения координаты поезда является использование метода импульсного зондирования, подробно изложенное в [54]. Основная идея метода импульсного зондирования состоит в том, что в РЛ посылаются импульсы напряжения, и по параметрам импульсов рассчитывается длина свободной РЛ (рис. 3.2). Для этого перед УП оборудуется измерительный участок lu, огражденный путевыми датчиками Д1 и Д2, которые управляют соответственно генераторами Г1 и Г2.
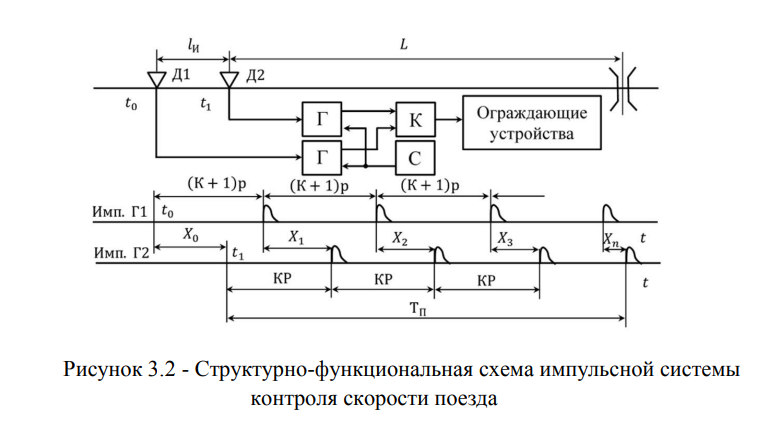
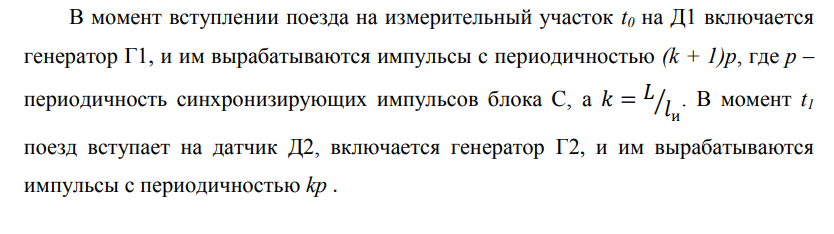
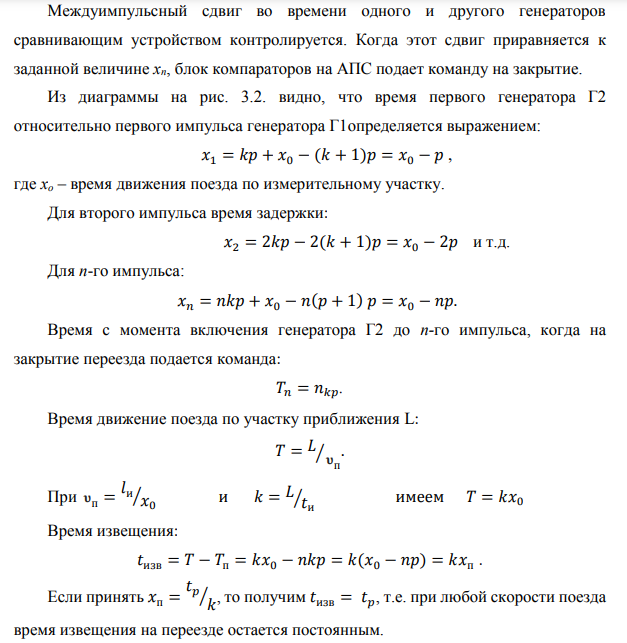
Недостатком способа является невысокая точность определения координат поезда из-за большого затухания импульсов и малой амплитуды вследствие большой проводимости изоляции между рельсами, малой емкости между РЛ, значительной погонной индуктивности, и, следовательно, большого волнового сопротивления. Так как РЛ не согласована, на спаде и фронте импульса зондирования возникают лишние колебания, с длительностью значительно превышающей длительность зондирующего импульса. Поэтому распознать импульс отклика очень сложно, что кроме сложности технической, определяет и его низкую точность.
Проблемы нарушения безопасности на переездах связаны со многими причинами, но основной является несовершенство однопараметрического датчика фиксации вступления поезда на УП к переезду, используемого в настоящее время [55]. Решить проблему возможно разработкой информационно-управляющей системы (ИУС) с многопараметрическим датчиком и самонастраивающимся уравнением вычисления координаты поезда с соответствующим алгоритмом управления транспортными потоками, закрывающим АПС не «заблаговременно», с огромным запасом времени запрета движения автотранспорту, а «по состоянию», когда уравнением координаты поезда вычисляется фактическое местоположение поезда, его скорость, и закрывается переезд для автотранспорта. В настоящее время в качестве датчика ИУС, АПС используются электрические РЦ, и в настоящей работе они использованы в качестве датчика информации. На рис. 3.3 представлена структурная схема, поясняющая принцип непрерывного определения координаты поезда.
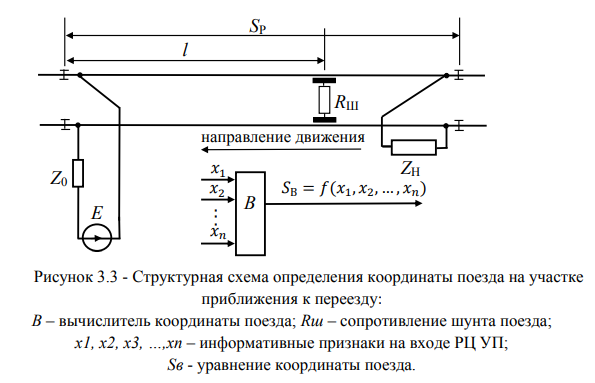
После вступления поезда на УП изменяются значения информативных признаков, являющихся аргументами уравнения вычисления координат поезда. Вычислитель с самонастраивающимся уравнением координат поезда с заранее определенными коэффициентами в произвольный временной промежуток вычисляет место поезда, и определять его скорость.
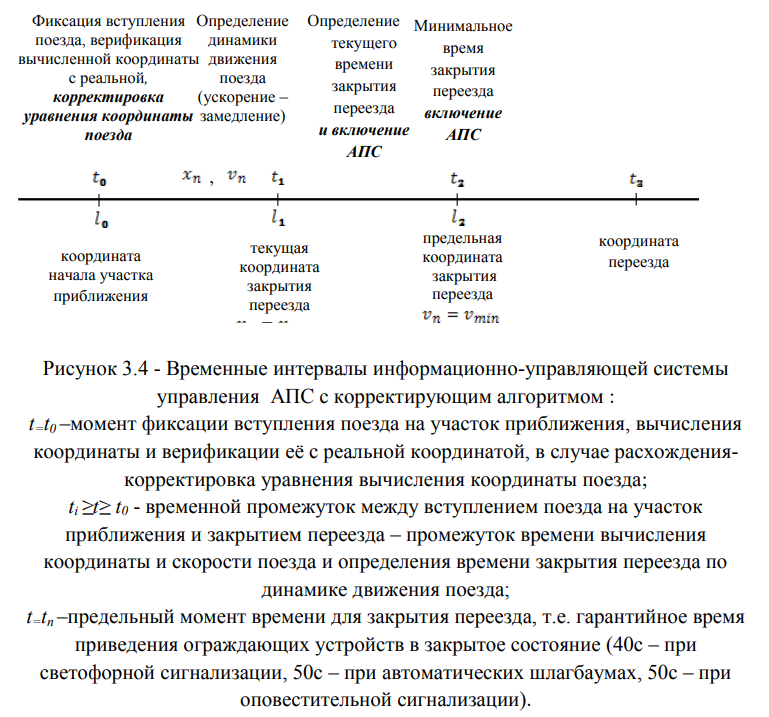
На рис. 3.4 представлены временные и координатные интервалы информационно-управляющей системы управления АПС с корректирующим алгоритмом.
Формирование системы информативных признаков координаты поезда
Прежде, чем приступить к построению информационно-управляющей системы с многопараметрическим датчиком и уравнением вычисления координаты поезда, инвариантной к воздействию возмущающих факторов, необходимо решить задачу выбора признаков, являющихся информативными параметрами датчика. Для построения эффективной системы распознавания координат поезда, образы, описывающие каждую координату в любой момент времени, должны быть похожими между собой и должны иметь достаточно близкие значения, т.е. должны составить кластеры состояний. Но из-за воздействия внешних факторов, значения некоторых признаков в образах различных координат могут иметь почти идентичные значения [56-59]. Поэтому при формировании множества необходимо учесть особенность различной реакции первичных информативных признаков на внешние воздействия, и при синтезе вычислителя координаты поезда в первую очередь необходимо определить оптимальный набор признаков, квазиинвариантных к внешним воздействиям и обеспечивающих максимальное качество распознавания координат [60].
На первом этапе выбора и селекции первичных информативных признаков в множество включаются все возможные признаки, а затем, с использованием процедуры оценки информативности, размерность матрицы первичных признаков, их количество существенно уменьшается, из признакового пространства формируется рабочее множество.
Одной из основных задач при формировании рабочего множества признаков является преобразование первичной информации для удобства кластеризации, если под классом понимается каждая координата поезда. В результате преобразования максимизируют расстояния между образами (кластерами) и минимизируют расстояния между значениями признаков внутри классов, т.е. образы становятся более компактными и обладающими более четкими границами классов [61]. При этом, как правило, стремятся также уменьшить размерность пространства признаков, исключая межклассовые признаки, не несущие полезной информации для классификации [62], но они могут быть полезны при диагностике АПС. В интуитивном понимании образы одного класса должны быть идентичны или должны иметь практически одинаковые значения из ряда признаков. Однако при этом могут присутствовать признаки, довольно сильно отличающиеся внутри образов, т.е. различные признаки по-разному характеризуют различные классы образов. При статистическом и вероятностном подходах оценки информативности и кластеризации, интересны методики, раскрытые в [63, 64], суть которых заключается в оценке плотности распределения. Для этого находятся пики плотности, которые принимаются за центры кластеров или образов, вокруг которых группируются остальные признаки. Представляет определенный интерес работа, представленная в [65], где рассматривается адаптивный алгоритм формирования признаков, полученный за счет развития теории распознавания информации на основе модифицированного метода Хаусдорфа, путем коррекции координат шаблонов подсистемы формирования координат (кластеров).
Вместе с тем, несмотря на множество методик, и алгоритмов группировки признаков, а также способов первичного преобразования исходных данных, при решении практических задач определения координат поезда, не допускающих ошибки при распознавании координат, применимость их ограничена, требуются огромные массивы эмпирических данных для построения системы вычисления координат.
Патрик Е.А. в фундаментальной работе [72] предлагает шесть способов понижения размерности пространства признаков. К ним относятся: рассмотрение локального понижения размерности в подпространствах, составляющих образы некоторого класса, изменение проекции пространств признаков, линейное преобразование и др. Однако из-за большого разнообразия процедур преобразования приемы представляют собой искусство, а не формализованную математическую процедуру.
Ивахненко А.Г. в монографии [73] предложил упорядочение признаков осуществлять оценкой дисперсии: если дисперсия признака велика, то надежность распознавания незначительна, и наоборот, малая дисперсия предполагает высокую надежность и поэтому признаки с малой дисперсией более ценны для распознавания. В работе [74] процесс селекции осуществляется по следующему алгоритму:
- формируются классы;
- экспертным анализом формируется первоначальное множество признаков;
- оцениваются ошибки классификации;
- из признакового пространства исключаются поочередно признаки и по величине ошибки формируется рабочее множество признаков.
Изучение источников в открытой печати показывает на недостаточную проработанность вопросов в области исследования информативности первичных признаков и формирования множества образов, не допускающих пересечения, а в области исследования информативных признаков при распознавании координат поезда на участке приближения исследования практически отсутствуют.
Из анализа литературных источников, приведенных выше, можно выделить два основных метода в оценке информативности (полезности) признаков, приемлемых при построении вычислителя координаты поезда. В одном из них выбор признаков осуществляется безотносительно к тому, где и как эти признаки в дальнейшем будут использоваться, т. е. вне системы распознавания. Другой метод предполагает оценку информативности с участием системы распознавания, т.е. с использованием набора признаков и уравнения координаты поезда. Далее, используя определенный критерий — относительную ошибку определения координат — оценивается информативность признаков, использованных при распознавании. Те признаки, которые дают наибольшую ошибку, исключаются из множества. Эти подходы не противоречат, а дополняют друг друга, поскольку на первом этапе считается, что принадлежность признаков к образам, описывающим координаты, неизвестна, и селекция признаков для формирования множества осуществляется по степени их идентичности или взаимосвязи, т.е. осуществляется их элиминирование или первичная обработка признаков, которые затем, на втором этапе, могут использоваться при распознавании. При этом используется обучающая выборка образов, составленная из прошедших селекцию признаков.
Корреляционная связь информативных признаков рельсовых цепей использована впервые в работе [77], где показана взаимокорреляционная связь пар признаков, согласно цели работы в нормальном режиме, то есть при отсутствии поезда на рельсах.
В данном разделе, в соответствии с поставленными задачами настоящей работы, исследуются попарные взаимокорреляционные связи при нахождении поезда на УП. Селекция и ранжирование информативных признаков осуществляется с помощью математических моделей, приведенных в [78]. Составлены математические модели на основе уравнений состояний:
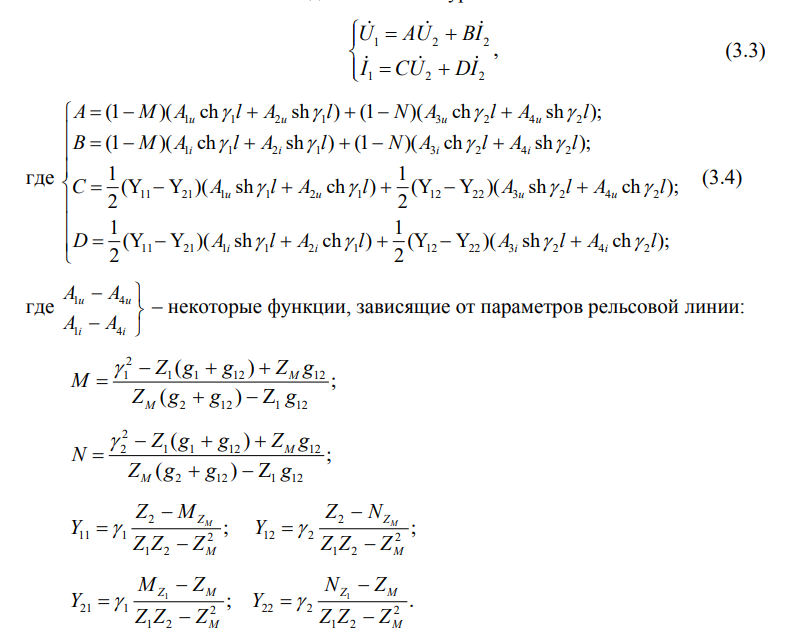
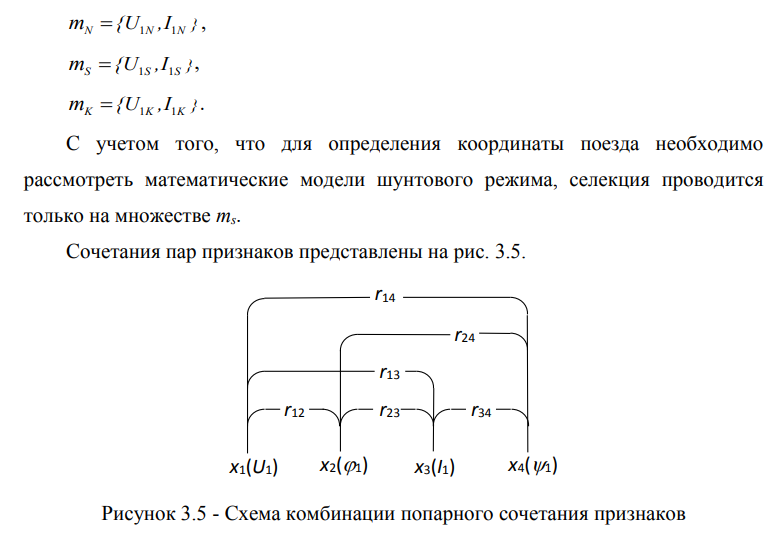
Используя уравнения (3.3) и (3.4), сформировано априорное множество первичных информативных признаков, подлежащее исследованию информативности:
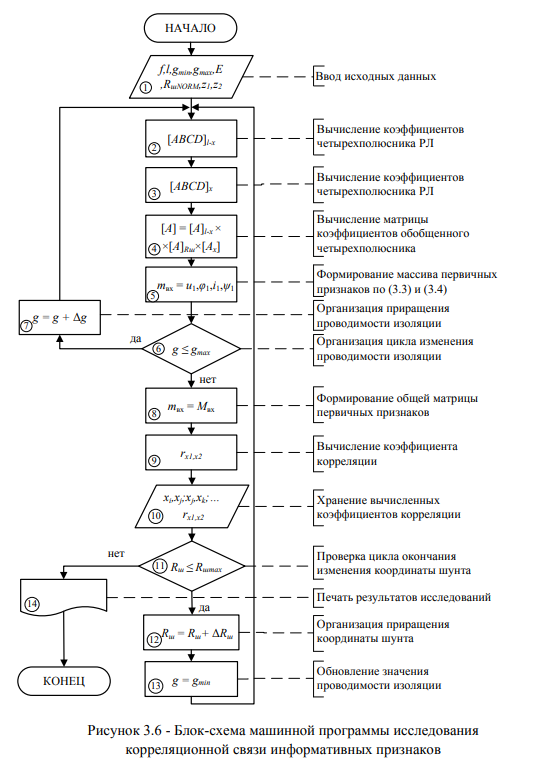
Блок-схема машинной программы исследования селекции признаков, представленная на рис. 3.6, реализована в среде Mathcad и состоит из последовательностей:
- определение коэффициентов матрицы рельсового четырехполюсника;
- формирование информационной матрицы первичных признаков;
- нормирование коэффициентов матрицы;
- вычисление коэффициента взаимной корреляции.
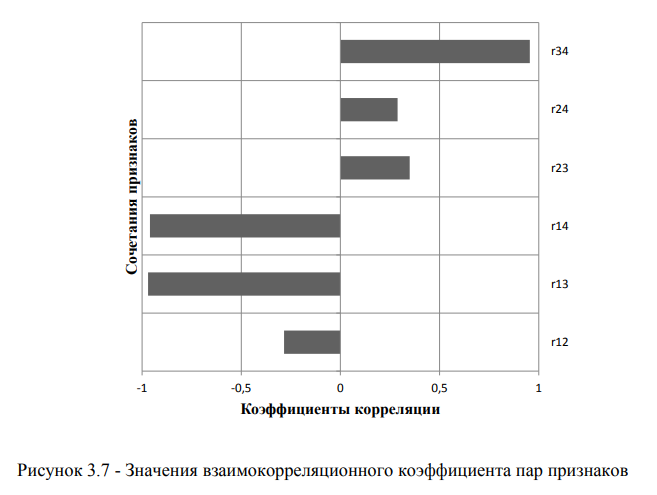
С использованием математического пакета для выполнения технических и математических расчетов Mathcad составлена программа, представленная в приложении Б, и проведены исследования корреляционных коэффициентов пар признаков. При моделировании и исследовании приняты следующие допущения — длина рельсовой линии 2 км, частота тока опроса рельсовых линий 25 Гц. Результаты исследований представлены на рис. 3.7 и в приложении В.
Разработка математических моделей информативных признаков
Решение задач математического моделирования РЦ, как правило, начинается с математического описания физических процессов в них и преобразования полученных выражений к виду, удобному для численного решения. Полученное математическое описание представляет собой математическую модель.
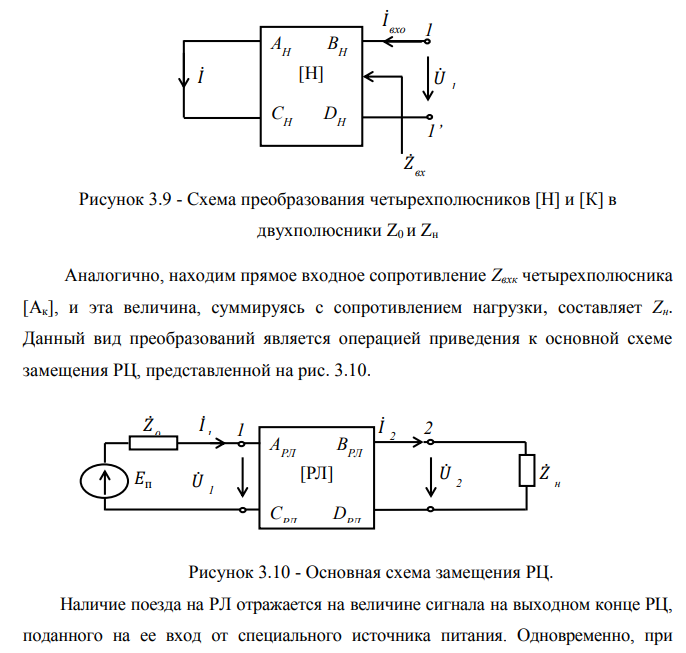
РЦ представляет собой датчик первичной информации о состоянии РЛ с распределенными параметрами. По своему функциональному назначению РЦ
классифицируют три состояния РЛ, а именно, исправное и свободное состояние, занятое и исправное состояние РЛ, свободное, но оборванное состояние рельсовой нити.
Для решения задачи анализа или синтеза РЦ, к математической модели предъявляются самые различные требования: описание с требуемой точностью процессов выходных параметров РЛ, внутренних параметров и внешних факторов в широком диапазоне их флуктуации, соответствие физическим процессам, протекающим в РЛ, универсальность. Указанные требования являются противоречивыми, и правильное компромиссное согласование требований в одном случае может оказаться далеким для оптимальности для других. По этой причине для одного и того же электрического параметра в различных состояниях часто приходится иметь не одну, а несколько моделей.
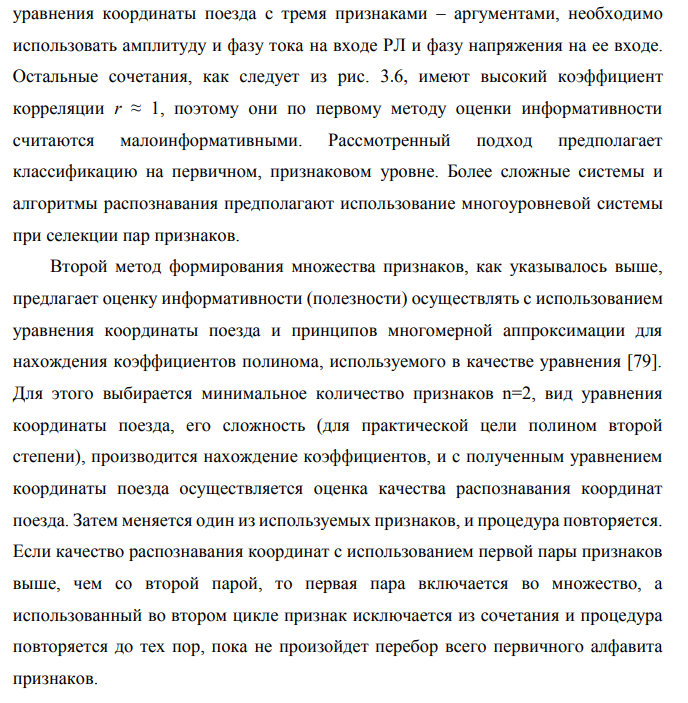
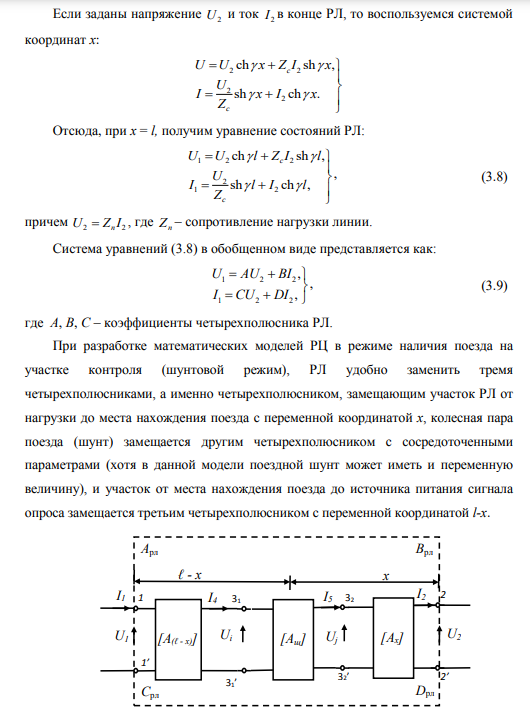
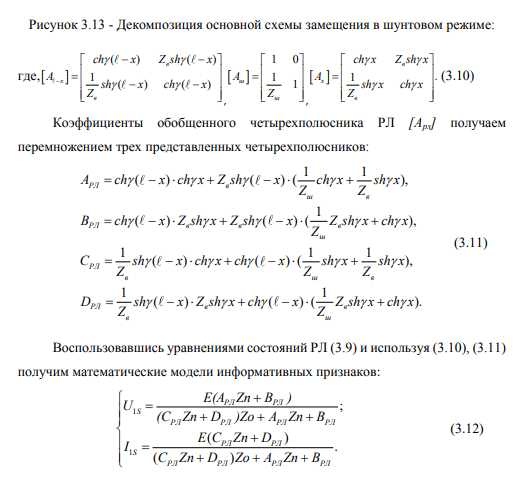
При синтезе и анализе РЦ применяется обобщенная схема из каскадного соединения трех четырехполюсников, замещающих соответственно устройства согласования источника питания с РЛ [АН], рельсовую линию [АРЛ] и устройства согласования приемной аппаратуры с РЛ [Ак].
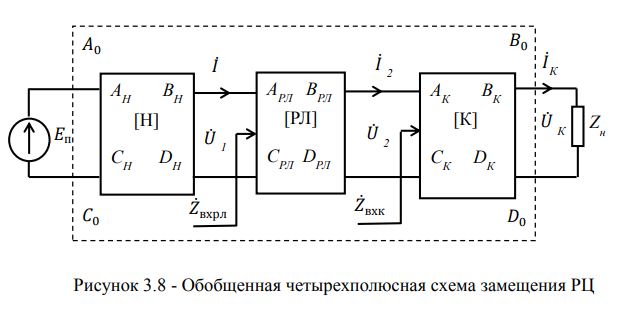
Коэффициенты обобщенного четырехполюсника [До] определяются перемножением матриц коэффициентов четырехполюсников [Ан], [Арл] и [Ак]. В обобщенной матрице коэффициенты [Ан] и [Ак] имеют постоянные значения, как правило, взятые из справочников, а коэффициенты [Арл] переменные, зависящие от первичных параметров РЛ — продольного сопротивления РЛ и поперечной проводимости изоляции. С учетом вышесказанного, для удобства моделирования, заменим четырехполюсники начала и конца комплексными двухполюсниками, замещающими параметры аппаратуры согласования в начале и в конце РЛ, для этого методом эквивалентного генератора находим величину обратного входного сопротивления Zвх четырехполюсника [Ан], которая и является двухполюсником Z0.
Исследование возможностей определения координаты поезда информацией отдельных признаков
В настоящее время известны способы определения координаты и, соответственно, скорости поезда на УП, представленные в источниках [82-84], по информации отдельных признаков, в качестве которых используются комплексные амплитуды напряжения и тока на входе РЛ. Согласно способам, при нахождении РЦ УП в шунтовом режиме блок вычисления координаты и скорости поезда на УП по значениям тока и напряжения сравнивает текущие значения с эталонными значениями. В результате сравнения текущих значений с эталонными определяется координата для приведения в действие АПС и закрытия переезда для автотранспорта. Согласно принципу, по скорости изменения тока в РЛ определяется скорость, а также положение и направление движения поезда [82].
Общий принцип действия способа управления АПС, представленного в [83, 84], основывается на прогнозе времени закрытия переезда. Как и в предыдущем случае, информационной базой являются входные напряжения и токи РЦ. Поступившая информация от РЦ обрабатывается, сравнивается с заранее рассчитанными задержками времени на закрытие переезда относительно неизменной длины УП, полагая что скорость приближения подвижной единицы равномерная.
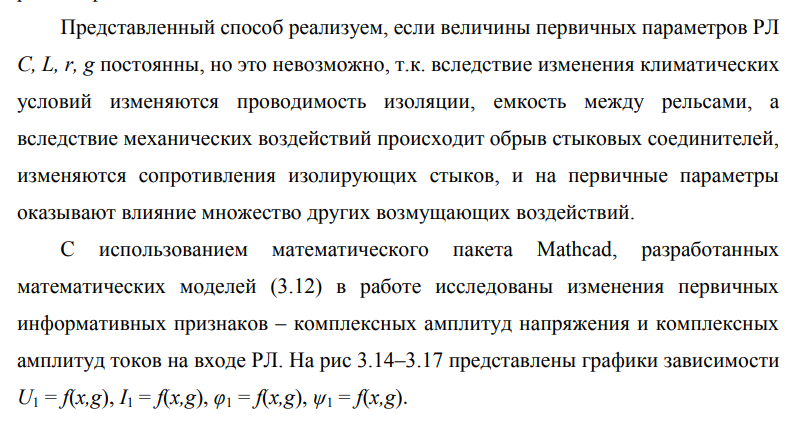
Машинная программа приведена в приложении Г. Результаты исследований представлены в виде таблиц и графиков в приложении Д, а также для частоты 25 Гц в виде графиков отражены в данном разделе. При моделировании и исследовании приняты следующие допущения: длина РЛ — 2 км, частота сигнального тока опроса рельсовых линий — 25 Гц, рельсы — Р65, диапазон изменения проводимости изоляции 5,0 > g > 0,1 См/км.
Из графиков следует, что по величине напряжения на входе РЛ определить координату невозможно, т.к. для одного значения напряжения, например, 0,75 В разброс координат составляет 475 метров, или одной координате соответствует разброс напряжений 0,239 В, при максимально возможном — 0,842 В, что недопустимо много для ИУС.
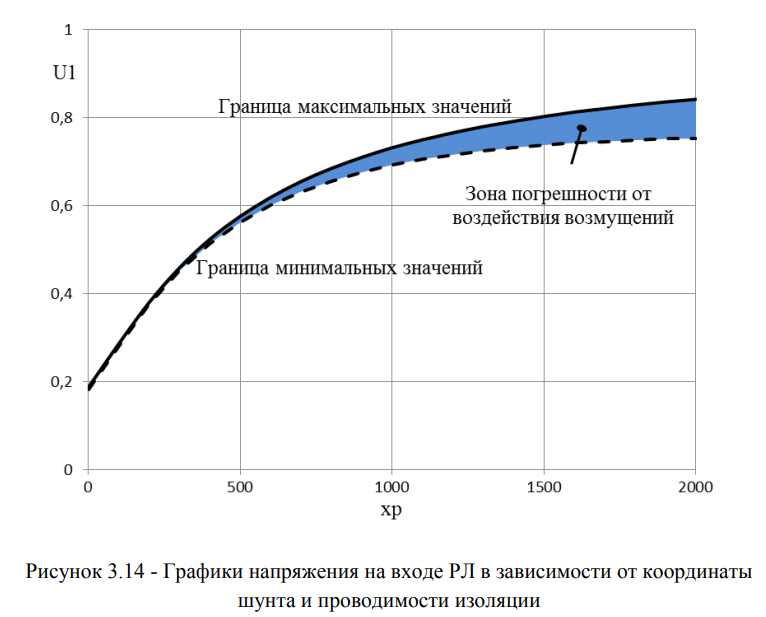
Как следует из графиков изменения фаз напряжения на входе РЛ, данный признак обладает относительно инвариантными свойствами к изменению проводимости изоляции РЦ. Вместе с тем график по значениям почти зеркальный, относительно координаты 1800 м, и фаза напряжения на входе РЛ при движении поезда от релейного конца растет от 8,8 до 22,8 эл. градуса, а затем на расстоянии 200 м от питающего конца РЦ УП — уменьшается до 3 эл. градусов. Таким образом, одинаковым значениям фазы соответствуют различные координаты, и поэтому без дополнительной информации ИУС не распознает координаты поезда по значению фазы напряжения.
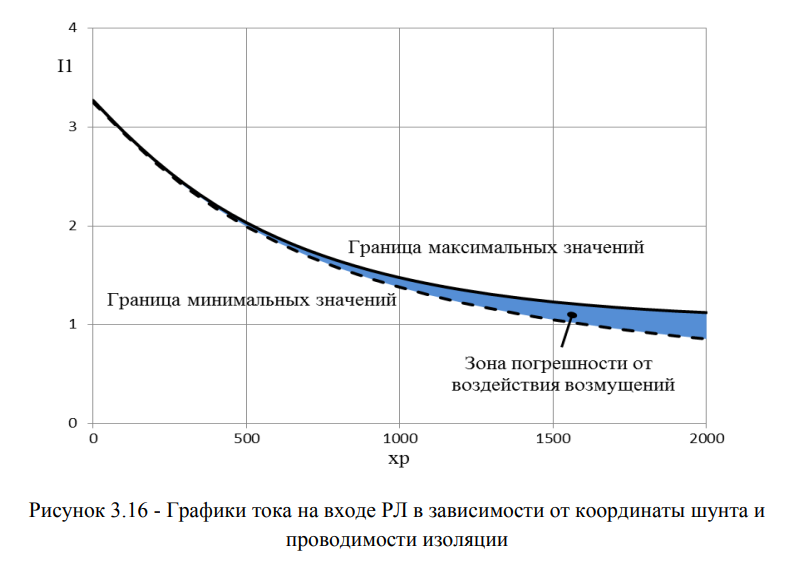
Графики значений тока на входе РЛ участка приближения более пологие и монотонные (рис. 3.16), но инвариантные свойства информативного признака — амплитуды тока не высокие. Как следует из графиков, приведенных на рис. 3.16, значения тока при нахождении поезда на другом конце РЛ и при колебании проводимости изоляции отличается на 32 %. Следовательно, одинаковым координатам соответствуют различные значения тока, и распознавание одним признаком по значению тока на входе РЛ и при колебании проводимости изоляции РЛ невозможно. Тем более определять скорость поезда по динамике изменения тока, согласно патенту [83], недопустимо, т.к. скорость будет определяться с ошибкой более 30 %. Такая ошибка приведет к различному времени приведения в действие АПС, и безопасность функционирования переезда не будет обеспечена. Более того, на РЛ и, соответственно, на входные электрические параметры влияют дополнительно возмущающие воздействия, которые также снижают точность определения координаты и скорости поезда на УП к переезду.
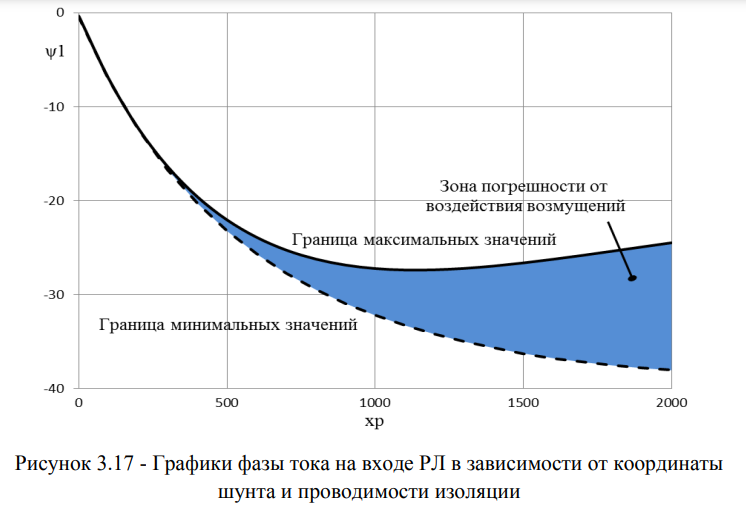
Из графиков следует, что аргумент тока на входе РЛ сильно подвержен воздействию проводимости изоляции. Начиная с ординаты 400 м от переезда, определять координату поезда информативным признаком — по величине фазы тока на входе РЛ — при изменении проводимости изоляции невозможно.
Анализ результатов исследований
Выводы по третьей главе
- Для информационно управляющей системы управления переездными ограждающими устройствами предложен многопараметрический датчик с уравнением вычисления координаты поезда и соответствующим алгоритмом управления АПС. В качестве информативных признаков — параметров датчика нахождения поезда на участке приближения — предложено использовать комплексные амплитуды напряжения и тока на входе рельсовой линии.
- Проведенный анализ литературных источников позволил сформировать два способа исследования информативности и селекции признаков — вне системы распознавания и включая систему распознавания. В главе проведена селекция признаков вне системы распознавания с использованием взаимокорелляционых коэффициентов и анализом динамики изменения признаков при движении поезда с релейного до питающего конца.
Список литературы
- Dougherty, G. Pattern Recognition and Classification: An Introduction / G. Dougherty. — Springer, 2013. — 207 p.
- Герус, В.Л. Возмущающие воздействия на рельсовые линии и их компенсация принципами инвариантности [Текст] / В.Л. Герус, Д.В. Железнов, Е.М. Тарасов, А.Е. Тарасова // Транспорт, наука, образование в XXI веке: опыт, перспективы, инновации: материалы VII междунар. науч.-практ. конф. — Оренбург, 2017.
- Герус, В.Л. Исследование информативности признаков при распознавании состояний рельсовых линий [Текст] / В.Л. Герус, Е.М. Тарасов, А.Е. Тарасова // Вестник Мордовского университета. — 2018. — Том 28, №2. — С. 191-207.
- Zhuravlev, Yu.I. Linear classifiers and selection of informative features / Yu.I. Zhuravlev, Yu.P. Laptin, A.P. Vinogradov, N.G. Zhurbenko, O.P. Lykhovyd, O.A. Berezovskyi // Pattern Recognition and Image Analysis. — 2017. — Vol. 27, №23. — P. 426¬432.
- Зенин, А.В. Анализ методов распознавания образов / А.В. Зенин // Молодой ученый. — 2017. — №16. — С. 125-130.
- Кулбараков, М. А. К задаче распознавания образов без учителя в технической диагностике / М.А. Кубараков // Молодой ученый. — 2014. — №18. — С. 55-57.
- Bai, Liang. Fast density clustering strategies based on the k-means algorithm / Liang Bai, Xueqi Cheng, Jiye Liang, Huawei Shen, Yike Guo // Pattern Recognition. — 2017. — Vol. 71. — P. 375-386.
- Ben, Hur A. Support vector clustering / Hur A. Ben, D. Horn, H.T. Siegelmann, V. Vapnik // J. of Machine Learning Research — 2001. — Vol. 2. — P.125-137.
- Myasnikov, E.V. Analysis of approaches to feature space partitioning for nonlinear dimensionality reduction / E.V. Myasnikov // Pattern Recognition and Image Analysis. — 2016. — Vol. 26, №3. — P. 474-482.
- Dokukin, A.A. Multilevel models for solution of multiclass recognition problems / A.A. Dokukin, V.V. Ryazanov, O.V. Shut // Pattern Recognition and Image Analysis. — 2016. — Vol. 26, №3. — p. 461-473.
- Tou, J.T. Advances in Information System Science // Plenum Press, New York. — 1970. — Vol. 3
- Машкин, А.В. Использование энтропийных мер в задачах оценки информативности признаков распознавания образов / А.В. Машкин // Программные продукты и системы. — 2009. — №4. — С.79-80
- Бартенев, В.Г. Анализ эффективности обнаружителей коррелированных сигналов в шуме для малых выборок наблюдений / В.Г. Бартенев // Цифровая обработка сигналов. — 2016. — №4. — С. 35-39.
- Principe, J.C. Information Theoretic Learning / J.C. Principe, D. Xu, J.W. Fisher // Unsupervised Adaptive Filtering. Wiley. — 2000. — Vol. 1 — P. 265-319.
- Patrick, Edward A. Fundamentals of Pattern Recognition. / Edward A. Patrick. — Prentice-Hall, 1972. — 408 p.
- Ивахненко, А.Г. Самообучающиеся системы распознавания и автоматического управления. / А.Г. Ивахненко. — Киев: Техника, 1969. — 392 с.
- Борисова, И.А. Сходство и компактность / И.А. Борисова, В.В. Дюбанов, Н.Г. Загоруйко, О.А. Кутненко // Математические методы распознавания образов: 14 всерос. конф.- М., 2009. — С.89-92.
- Бобков, А.В. Нормирование пространства признаков при использовании обобщенного преобразования Хафа / А.В. Бобков // Наука и образование: научное издание МГТУ им. Н.Э. Баумана электронный научно-технический журнал. — 2014. — №2. — С. 286-295.
- Тарасов, Е.М. Инвариантные классификаторы состояний рельсовых линий для систем интервального управления движением поездов : автореф. дис. … докт. техн. наук : 05.13.05 / Тарасов Евгений Михайлович. — Самара, 2004. — 32 с.
- Куров, М.Б. Устройство контроля проводимости изоляции рельсовых линий для систем интервального управления движением поездов : дис. … канд. техн. наук : 05.13.05 / Куров Михаил Борисович. — Самара, 2004. — 172 с.
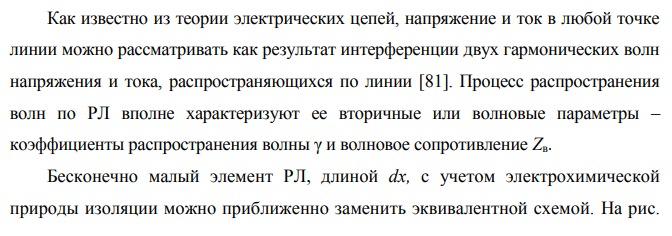
- Брылеев, А.М. Теория, устройство и работа рельсовых цепей / А.М. Брылеев, Ю.А. Кравцов, А.В. Шишляков. — М.: Транспорт, 1978. — 344 с.
- Bishop, C. Pattern Recognition and Machine Learning / C. Bishop. — Springer, 2006. — 738 p.
- Волик, В.Г Численный метод расчета сопротивления рельсовой линии переменному току / В.Г. Волик // Актуальные проблемы развития железнодорожного транспорта: материалы 2-й междунар. науч.-практ. конф. — Самара, 2006. — С.182-184.
- Каганов, В.Г. Электрические цепи с распределенными параметрами и цепные схемы / В.Г. Каганов. — М.: Энергоатомиздат, 1990. — 249 с.
- Патент RU 2632544 Система закрытия железнодорожного переезда / Маркес Мезитис (LV), Александрс Николаевс (LV), Владимирс Каревс (LV) — заявл. 16.02.2016г., опубл. Б.И. 2017г., №15.
- Патент RU 2619507 Система вычисления времени задержки закрытия железнодорожного переезда / Маркес Мезитис (LV), Александрс Николаевс (LV), Владимирс Каревс (LV) — заявл. 16.02.2016г., опубл. Б.И. 2017г., № 14.
- Патент RU 2610903 Способ управления закрытием железнодорожного переезда / Маркес Мезитис (LV), Александрс Николаевс (LV), Владимирс Каревс (LV) — заявл. 17.02.2017г., опубл. Б.И. 2017г., №5.
- Мохонько, В.П. Устройство контроля координаты и скорости поезда системы управления переездной сигнализацией : автореф. дис. … канд.. техн. наук : 05.13.05 / Мохонько Владимир Петрович. — Самара, 2002. — 24 с.
- Мохонько, В.П. Система обеспечения безопасности движения на железнодорожных переездах / В.П. Мохонько, В.И. Варгунин, Е.М. Тарасов // Экономика, эксплуатация и содержание железных дорог в современных условиях : межвузовский сб. науч. тр. — 1999. — №17.
- Мохонько, В.П. Использование информации о входном сопротивлении рельсовой линии для определения координаты и скорости подвижной единицы / В.П. Мохонько, Е.М. Тарасов, А.С. Белоногов // Безопасность транспортных систем: 2-я Междунар. науч.-практ. конф. — Самара, 2000. — С. 77.