
Цикл статей:
Глава 1 — Повышение безопасности на железнодорожных переездах на основе совершенствования управления автоматической переездной сигнализацией
Глава 2 — Мероприятия по повышению безопасности и снижению аварийности на железнодорожных переездах
Глава 3 — Разработка и исследование системы информативных признаков координаты поезда
Глава 4 — Разработка вычислителя координаты и скорости поезда с корректирующим алгоритмом
Логические и управляющие системы железнодорожной автоматики и телемеханики (ЖАТ), построенные на контактных реле, достаточно безопасны и надежны, но в них удается реализовать только сравнительно простые функции. Поэтому в последнее время вместо контактных реле в качестве элементной базы в системах ЖАТ внедряются более экономичные микроэлектронные элементы, имеющие малые габаритные размеры и обладающие достаточно высокой надежностью. Эти и другие достоинства обеспечивают широкое их применение в железнодорожной автоматике. В то же время использование микропроцессорных систем (МС) допустимо только в тех случаях, когда уровень безопасности движения, гарантируемый устройствами этих систем, не ниже того уровня, который обеспечивается устройствами, реализованными на базе контактных реле [111-113]. Это требование является основным критерием возможности использования новой элементной базы в системе АПС, обеспечивающей безопасность движения поездов.
В случае отказа системы ЖАТ на контактных реле в электрической цепи размыкаются контакты под действием силы тяжести якоря или реакции пружин, таким образом система будет переведена в безопасное положение. Поведение микроэлектронных элементов при отказе сложно прогнозировать. Из-за высокой степени интеграции сложно локализировать отказ внутри микроэлектронной схемы, затруднителен полный контроль поставляемых микроэлектронных изделий на соответствие техническим условиям. При загрузке программы в микроЭВМ необходимо убедиться в отсутствии в ней хотя бы одного пропуска, поскольку даже незначительная корректировка в одной области программы может оказать непредсказуемое влияние на другие ее области.
Высокая надежность и безопасность отказов микропроцессорных систем может быть достигнута в результате использования различных методов автоматического контроля работы и автодиагностики [114, 115] (программного контроля), а также применения избыточных аппаратных средств.
Программный контроль, или так называемое временное резервирование, базируется на специальных программах для контроля отдельных узлов и устройств в целом. Чтобы обеспечить надежную защиту от ошибок, даже используют двух программистов для независимого друг от друга составления и отладки одинаковых программ на двух МС разных типов. Если при этом достигается согласованная работа обоих МС, то уровень защиты от программных ошибок считается высоким, так как вероятность их появления в результате совпадения ошибочной информации в обоих областях памяти очень мала.
Реализация на микроэлектронной элементной базе с расширенными функциональными возможностями позволяет достичь таких показателей, которые определяют существенные преимущества новой системы перед системой на релейной основе [116].
К этим показателям относятся: компактность и малые габаритные размеры аппаратуры (электронные схемы переездной сигнализации, автоматического самодиагностирования, обнаружения препятствий размещены в одном корпусе), повышенная эксплуатационная надежность (логическая организация исключает возможность серьезных аварий), универсальность (приспособление к условиям работы конкретного переезда осуществляется не на аппаратном, а на программном уровне), автоматическое включение переездных сигналов с выбором момента включения по скорости приближающегося к переезду поезда, электронное регулирование уровня звукового предупредительного сигнала, расширенные функции автоматического самодиагностирования (контроль работоспособности звукового предупредительного сигнала, переездного светофора, переездного шлагбаума), постоянный централизованный контроль за работой переездов, автоматическое обнаружение препятствий движению поезда, управление АПС на автомобильной дороге, эффективное информационное оповещение локомотивных бригад и водителей АТС.
Разработка структурной схемы автоматической переездной сигнализации с корректирующим алгоритмом
По сравнению с традиционной микроэлектронная аппаратура АПС с корректирующим алгоритмом при значительно меньшей массе, габаритных размерах и потреблении электроэнергии обладает большими функциональными возможностями, она более проста в эксплуатации и техническом обслуживании, ее стоимость ниже традиционной. Высокий уровень эксплуатационной надежности новой системы достигается комбинированным использованием параллельного резервирования и самодиагностирования аппаратуры, обеспечивая уровень полноты безопасности [117].
Алгоритм функционирования АПС с функцией корректировки уравнения вычисления координаты поезда представлен на рис. 5.1.
При отсутствии поезда блок проверки вступления поезда циклически проверяет изменение состояния датчика, расположенного в начале участка приближения, а именно, при вступлении поезда на УП на входе хр блока сравнения появляется логическая единица, и включаются устройства контроля свободности переезда (пространство между шлагбаумами), и если переезд не свободен, то включается заградительный светофор навстречу поезду.
При свободном переезде микропроцессорная система управления АПС, используя уравнение вычисления координаты с заранее определенными коэффициентами, аргументами — информативными признаками, вычисляет координату поезда в момент вступления на участок приближения, и эта информация поступает на первый вход блока сравнения, на другой вход которого поступает информация о длине УП хр.
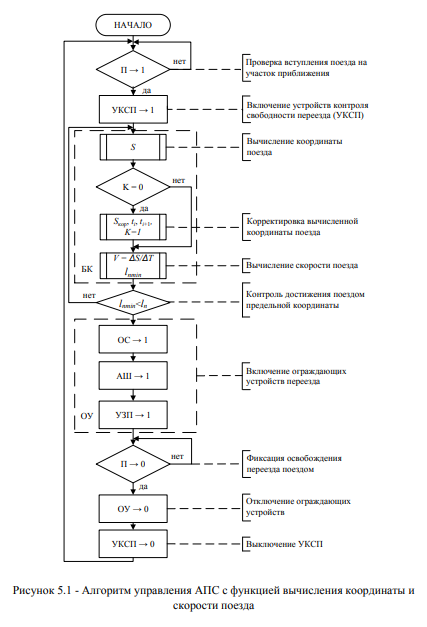
Если вычисленное значение координаты поезда (блок 3) совпадает с реальной координатой поезда хр, то корректировка уравнения не производится, и МВК продолжает вычислять текущие координаты поезда. При этом считается, что вычисленные значения координат истинные, а если сравнение приводит к отрицательному результату, то координаты поезда, вычисленные уравнением координат, считаются ложными, и включается процесс корректировки уравнения до получения истинных значений вычисленных координат.
В дальнейшем определяются параметры движения поезда (координата I, скорость V, ускорение а), и на основании этих параметров, с учетом динамических характеристик поезда, вычисляется критическая (минимальная) координата до переезда, при достижении которой, поездом включаются ограждающие устройства (ОУ), а именно, переездной светофор ОС, закрываются шлагбаумы АШ, и включаются устройства заграждения переездов УЗП, препятствующие несанкционированному въезду автотранспорта на переезд. Эти действия выполняются операторами 6-10. Условия достижения поездом предельной координаты проверяется оператором 7.
Согласно алгоритму переезд остается закрытым до тех пор, пока оператор 11 не зафиксирует проследование поезда через переезд. Оператор 11, циклически проверяя условие, фиксирует освобождение переезда поездом, затем оператор 12 выключает оповестительную сигнализацию, открываются шлагбаумы, и отключаются УЗП, а также выключаются оператором 13 устройства обнаружения препятствий УКСП. В случае, когда повреждена оповестительная сигнализация или не закрываются шлагбаумы, или не работает УЗП, включается заградительная сигнализация, и прекращается кодирование рельсовых цепей. Поезд снижает скорость и останавливается. Информация о повреждениях по линии диспетчерского контроля передается поездному диспетчеру, и ситуация регистрируется на сервере мониторинга функционирования устройств инфраструктуры, центра управления перевозками.
Разработанный и представленный на рис. 5.1 алгоритм функционирования АПС предполагает одностороннюю постоянно действующую сигнализацию в сторону автодороги. Сигнализация в сторону железной дороги включается лишь при нештатных ситуациях.
На рис. 5.2 представлена структурно-функциональная схема АПС с вычислителем координаты поезда с корректирующим алгоритмом [118] реализованным с использованием микропроцессорных систем.
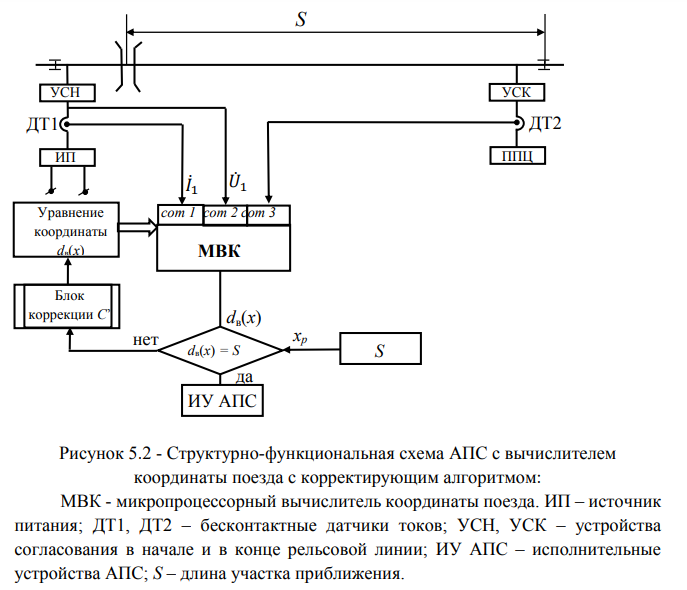
При вступлении поезда на УП, ограниченный изолирующими стыками, на
релейном конце скачкообразно изменяется (уменьшается) значение тока [119, 120].
Информация об этом от второго датчика тока ДТ2 передается на вход сотЗ МВК, и
фиксируется информация о вступлении головы поезда на релейный конец на
координате хр. В это же время, в момент вступления поезда на УП,
микропроцессорный вычислитель координаты, непрерывно контролирующий значения первичных признаков U1, I1 на входах comí и com2, на питающем конце РЛ, вычисляет текущую координату поезда, и эта вычисленная координата dB(X) поступает на вход блока сравнения, где сравнивается с фактической координатой S головы поезда в самом начале участка приближения, информация о которой уже поступила в блок сравнения с другого входа.
Необходимо отметить, что в данном устройстве в память микропроцессорного вычислителя координаты МВК записано уравнение вычисления координаты поезда, коэффициенты которого определены при нормативных значениях первичных параметров РЦ, параметров согласующих устройств в начале и в конце рельсовой цепи, а именно: продольного сопротивления РЛ, емкости между рельсами, а также ограничительного и нагрузочного сопротивлений РЦ УП.
При неравенстве значений du(X) и S автоматически корректируются коэффициенты уравнения координаты в блоке корректировки БК до равенства вычисленной координаты поезда фактической координате. При достижении равенства вычисленной и фактической координат поезда, МВК циклически вычисляет текущие координаты поезда, а затем, с учетом возможного его ускорения, вычисляет фактическую координату закрытия переезда согласно временным интервалам, показанных на рис. 3.2 и блок-схемы, на рис 4.6. Вычисленные значения передаются в исполнительное устройство ИУ АПС устройства управления ограждающими устройствами АПС.
Разработка структурной схемы микропроцессорного устройства
управления АПС
Повышенные требования к системам ЖАТ, которые продиктованы сложными условиями перевозочного процесса, обеспечение безопасности движения поездов в большинстве случаев не позволяют практически применить обычные универсальные микроЭВМ. Поэтому создаются специализированные микропроцессорные системы, отвечающие повышенным требованиям к надежности обработки информации и обеспечивающие функциональную безопасность систем ЖАТ, рассмотренных в ряде международных стандартов [121-124], для управления технологическим процессом, осуществляемым в трудных условиях функционирования ЖАТ (при низкой или повышенной температуре, влажности, динамическим воздействиям со стороны движущихся поездов, электромагнитным влияниям тягового тока, грозовых разрядов). Для выполнения этих требований и обеспечения безопасного и бесперебойного действия микропроцессорных устройств управления АПС (МАПС) предлагается разветвленный технический комплекс, состоящий из двух независимых вычислительных каналов [125], в которых обрабатываемая информация по — разному представляется и кодируется; цикличное сравнение промежуточных и конечных результатов; разветвленное программное обеспечение, при котором в обработке информации участвуют две независимые и разные программы; тщательная проверка каждой программы для снижения вероятности независимых ошибок в двух программах до очень малой величины; корректировка входной информации в каждом цикле; указание времени появления новых данных о признаках для своевременного устранения устаревшей информации; резервирование вычислительных каналов; тщательная отработка системы, включая программы, для обеспечения независимости каналов и исключения возможности того, что какое-либо повреждение окажет на оба канала идентичное влияние. Выполнение этих основных принципов защищает МАПС от опасных последствий сбоев или отказов отдельных ее компонентов, влияния внешних помех или ошибок программ.
В МАПС (рис. 5.3) используется режим разделения машинного времени в общем процессоре ОП для двух вычислительных каналов А и Б, которые содержат устройства ввода данных УВв А и УВв Б, сравнивающее устройство УС, аварийную сигнализацию АС, устройства вывода данных УВ А и УВ Б, шину передачи данных ПД, исполнительный процессор ИП с устройством сравнения и выдачи команд СВК на безопасные интерфейсы устройства управления ограждающими устройствами (УОУ). В каналах А и Б обрабатывается информация, представленная в разных форматах.
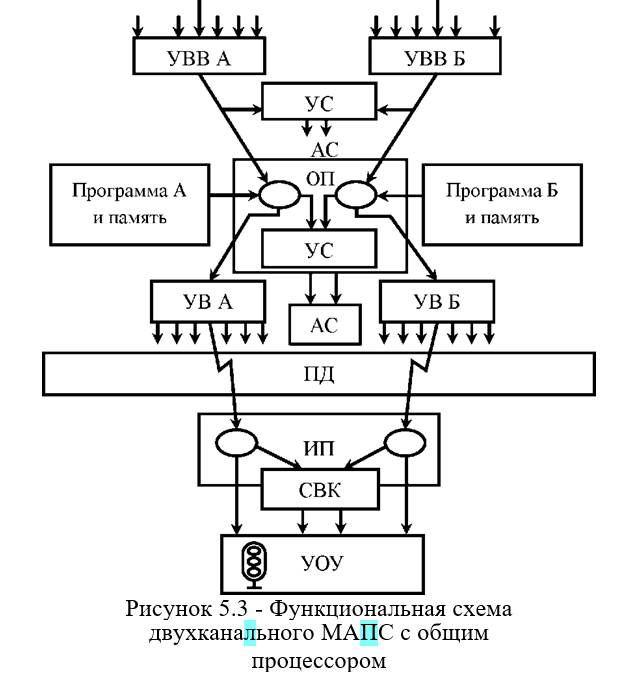
Каналы имеют независимые программы, т. е. работают совместно с ОЦ в разных режимах. Поэтому повреждение ОЦ повлияет на каналы А и В по-разному, и при сравнении результатов обработки данных оно будет выявлено. С помощью внутренних сравнений и тестовых программ выявляются отказы элементов обоих каналов, а блоками управления напольными устройствами — повреждения этих устройств.
Блоки управления имеют электронные переключатели устройств в безопасное положение. Для поддержания электроснабжения управляемых устройств на блоки управления из обоих каналов должна поступать специальная информация.
Процессор ОЦ обрабатывает информацию в циклическом режиме. В течение каждого цикла, длительностью 0,6 с, собирается вся необходимая информация о состоянии управляемых объектов; обрабатываются извещения и данные о зависимостях МАПС по двум отдельным программам; формируются и выдаются команды; передается информация о состоянии управляемых объектов в процессор управления вводом и отображением данных. В функциональной схеме, представленной на рис. 5.3, резервирование реализуется программно, т.е. процессор один, но он циклически обращается к различным программам канала А и канала Б. Результат вычисления сравнивается, и при совпадении считается, что система функционирует правильно.
Разработка двухканального микропроцессорного устройства управления
АПС нагруженным резервом
В системах с высокими требованиями к безопасности функционирования, к которым относятся системы управления переездными ограждающими устройствами, удобно использовать избыточность аппаратных средств [113, 126] (пространственное резервирование). Наиболее эффективным и мало затратным способом достижения безопасности и отказоустойчивости является многоканальная избыточность с нагруженным резервом, реализованная из двух параллельно работающих МС, по принципу «2 из 2», и дополненных логическим устройством сравнения: систему из двух параллельно работающих МС можно считать исправной только тогда, когда исправны оба канала обработки данных, и информация на их выходах адекватна.
Логическое устройство сравнивает результаты работы, выдаваемые каждым МС, и при полном их совпадении допускает полученные данные к управлению АПС. При несовпадении результатов или каком-либо другом отказе системы выполнение программы обеими МС прерывается, а управление процессом блокируется, и ограждающие устройства закрываются.
Разработанная структурная схема двухканального микропроцессорного устройства управления АПС нагруженным резервом состоит из двух микроконтроллеров МК1 и МК2 с микропроцессорами МП и запоминающими устройствами ЗУ и двух сравнивающих устройств СУ с памятью сбоев (рис. 5.4)
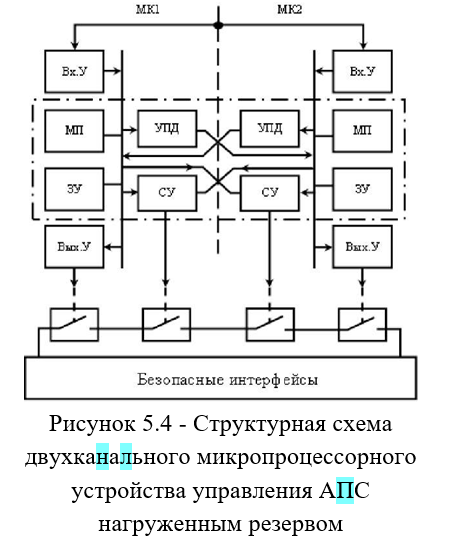
В результате непрерывной синхронной работы МК1 и МК2 по аналогичным программам выполняется двухканальная обработка информации с бесконтактных датчиков тока и напряжения, построенных на принципе Холла, поступающая на входные устройства Вх.У [127]. Идентичность протекания процессов обработки информации в обоих каналах обеспечивается синхронизацией всех шагов программы двухканальным тактовым генератором путем синхронной посылки в МК1 и МК2 тактовых импульсов.
Для синхронизации процессов обработки информации в обоих каналах необходимо также одновременное поступление в МК1 и МК2 входных данных. Это достигается благодаря автоматическому распределению данных между ними, выполняемому устройством передачи данных УПД. Устройство СУ, имеющееся в каждом канале, сопоставляет выходные данные. При появлении разницы между ними, оно записывает это в память обоев СУ и обесточивает все коммутируемые им цепи в схеме безопасных интерфейсов, что обеспечивает безопасное состояние управляемого процесса. Устройство СУ и память сбоев работают независимо от микроконтроллеров, благодаря чему любые ошибки в работе МК1 и МК2 не влияют на процесс сравнения данных и не меняют записанной в памяти информации о сбоях. Систему запускает обслуживающий персонал после устранения повреждения.
Самостоятельное и независимое сравнение в СУ каждой выходной операции МК1 и МК2 исключает опасное воздействие на управляемый процесс, так как практически невозможно одновременное появление на выходах устройств Вых.У ошибочных данных, возникающих по разным причинам. Для нормальной работы системы требуется совпадение выходных данных обоих каналов в интервале времени, не превышающем 100 нс. Высокая надежность СУ обусловлена простым схемным малым числом элементов.
Любой одиночный отказ в системе не представляет опасности, так как все ответственные функции выполняются по двум независимым каналам, и только совпадение результатов активизирует управляемый процесс. Система защищена от многократных отказов тем, что в результате циклической проверки будет обнаружен уже первый отказ, который приведет систему в безопасное положение прежде, чем возникнет второй. Отказы в сравнивающих устройствах, как правило, безопасны, поскольку могут привести только к остановке управляемого процесса. Опасное положение возможно только при одновременном появлении четырех независимых друг от друга отказов (по одному в каждом сравнивающем устройстве и каждого микроконтроллера), возможность чего чрезвычайно мала.
Для обнаружения отказов в МК1 и МК2 заложена программа, которая проверяет все их функции, включая работу СУ. При этом тестированию подвергаются все возможные комбинации слов-операндов. Другие части проверочной программы тестируют запоминающие устройств, периферийные блоки и все функции системы шин. Программная проверка функций системы периодически повторяется, по меньшей мере, каждые 30 мин.
В большинстве функциональных узлов микроконтроллеров, а также в периферийных устройствах отказы обнаруживаются программным способом па основе сравнения заданных и фактических параметров. Система переходит в безопасное состояние только в том случае, когда недопустима или нецелесообразна дальнейшая обработка информации. Отказ, не способный вызвать опасные последствия, например, влияющий только на процесс ввода данных, не приводит к остановке всей системы, а только вносит в нее соответствующее функциональное ограничение.
В следующем, модифицированном, варианте все блоки обеспечивают гальваническую развязку между исполнительными элементами и микроконтроллером (рис. 5.5).
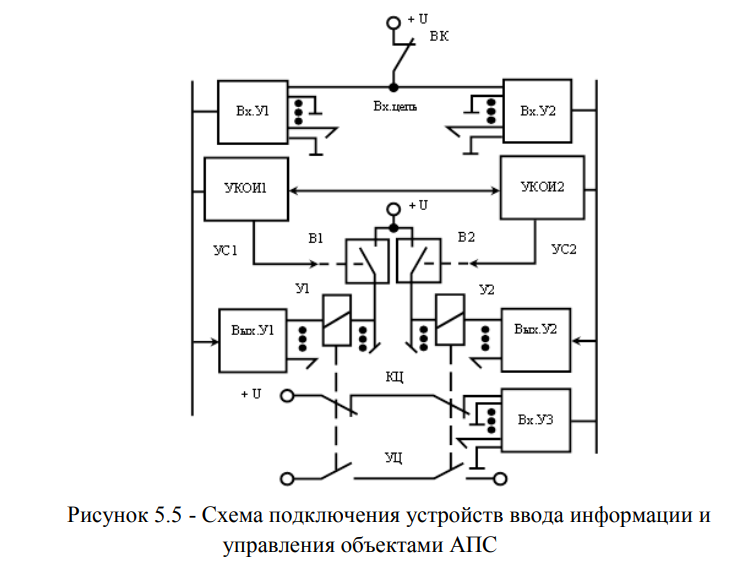
В качестве развязывающих элементов использованы трансформаторы и оптронные пары. Ввод и вывод информации в систему периферийными устройствами происходит таким образом.
С момента подачи напряжения питания через входной контакт ВК на входные устройства Вх.У1 и Вх.У2 до начала управления происходит несколько стадий процесса. Вначале осуществляется самотестирование устройств контроля и обработки информации УКОИ1 и УКОИ2 при непрерывном контроле результатов сравнивающими устройствами, после чего УКОИ1 и УКОИ2 инициируют периферийные устройства. При этом в выходные устройства Вых.У1 и Вых.У2 поступают команды на обесточивание подключенных к ним управляющих реле У1 и У2. Затем УКОИ1 и УКОИ2 проверяют работоспособность периферийных устройств: в одном канале устройства должны выполнять заданные функции, отличные от функции устройств другого канала. Таким образом, наряду с единичными отказами обнаруживаются двойные ошибки в аналогичных периферийных устройствах обоих каналов.
С помощью третьего входного устройства Вх.УЗ устройствами Вых.У1 и Вых.У2 проверяется обесточенное состояние реле У1 и У2. При условии, что к данному моменту времени сравнивающими устройствами не зафиксирован отказ, система, выдавая управляющий сигнал по первому каналу УС1, подает рабочее напряжение на выходное реле В1. Если У1 и У2 остаются без тока, система после дальнейшего тестирования Вх.У1 и связанного с ним У1, вновь снимает напряжение отключением В1. Аналогично проверяется Вых.У2. Эти проверки предотвращают ошибки при выходе информации. Алгоритм работы входных устройств основан на том, что только наличие тока во входной цепи может вызвать активизацию управляемого процесса. Поэтому входные устройства сопряжения с датчиками напряжения и тока (рис. 5.6) строятся по принципу самоконтролирующихся схем.
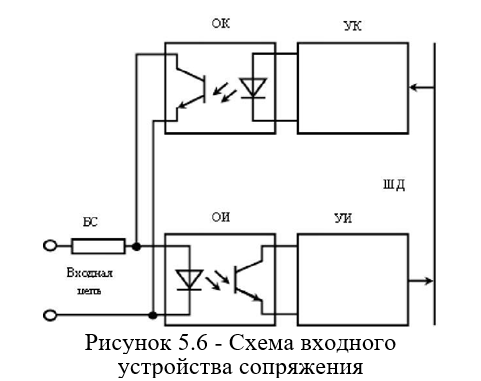
Ток, протекая по входной цепи с балластным сопротивлением БС, вызывает свечение светодиода в оптопаре извещения ОИ, которое приводит к передаче сигнала в шину данных ШД и далее в микроЭВМ, которая посылает квитирующий сигнал в устройство контроля УК, вызывая свечение светодиода в оптопаре контроля ОК. Фототранзистор в ОК., открываясь, шунтирует светодиод в ОИ, что, в свою очередь, приводит к изменению информации на выходе устройства извещения УИ, обеспечивая обратную связь. При такой конструкции входного устройства обнаруживается любой отказ, вызывающий протекание постороннего тока по входной цепи.
После завершения всех проверок оба микроконтроллера с помощью выходных реле В1 и В2 (рис. 5.5) включают периферийные устройства и начинают управлять эксплуатационным процессом, обеспечивая при этом быстрое считывание и обработку входных данных и подготовку выходных данных. Каждый сигнал, поступивший во входное устройство, сейчас же проверяется на отсутствие отказов во входной цепи [128-130]. Кроме того, контролируются сигналы, действующие уже продолжительное время. Только после завершения этих проверок подготовленные выходные данные выводятся из системы.
В процессе вывода данных учтены все теоретически возможные отказы выходных устройств. До начала вывода данных при помощи Вх.УЗ контролируется неизменность состояний У1 и У2 с момента последнего вывода информации. Затем новые выходные данные поступают вначале только в Вых. У1. До истечения времени задержки на подключение У1 устройством Вх. УЗ проверяется неизменность состояний обоих реле. Лишь теперь новые данные поступают в Вых. У2. Во время задержки на переключение У2 также сравнивается фактическое состояние этого реле с заданным. При соответствии состояний вывод данных считается завершенным.
Такая процедура вывода данных устраняет влияние ошибок на управляемый процесс даже в случае появления одинаковых отказов в обоих выходных устройствах: если данные, поступающие на Вх. У1, ошибочны, то Вых. У2 уже не отреагирует на них таким же образом, как Вых.У1. Благодаря последовательному включению контактов управляющих реле в исполнительную цепь обеспечивается безопасность работы системы при отказе одного из ее каналов. Однако безопасное состояние системы не исключает возможности появления отказов. Если угроза безопасности движения поездов из-за отказа отсутствует, то управление процессом
может продолжаться без участия отказавшей части системы. В противном случае программа приводит в действие сравнивающие устройства, которые посредством управляющих сигналов выключают выходные реле, обесточивая тем самым реле У1 и У2. После этого каждое выходное устройство получает запирающую команду, которая исключает возможность работы всех устройств, включая исправные.
Многоканальная микропроцессорная система управления АПС
Создание микропроцессорных систем с более чем двумя каналами обработки данных позволяет еще больше повысить безопасность отказов и надежность действия этих систем [131]. Трехканальная система, в которой реализуется принцип мажоритарной логики «2 из 3» (система работоспособна, если хотя бы два из трех каналов исправны, и информация на выходах этих двух каналов адекватна), представленная на рис.5.7, может находиться в одном из трех состояний: полной исправности (нет повреждений), исправности двух каналов (поврежден один из трех каналов); неисправности системы (повреждено два канала и более).
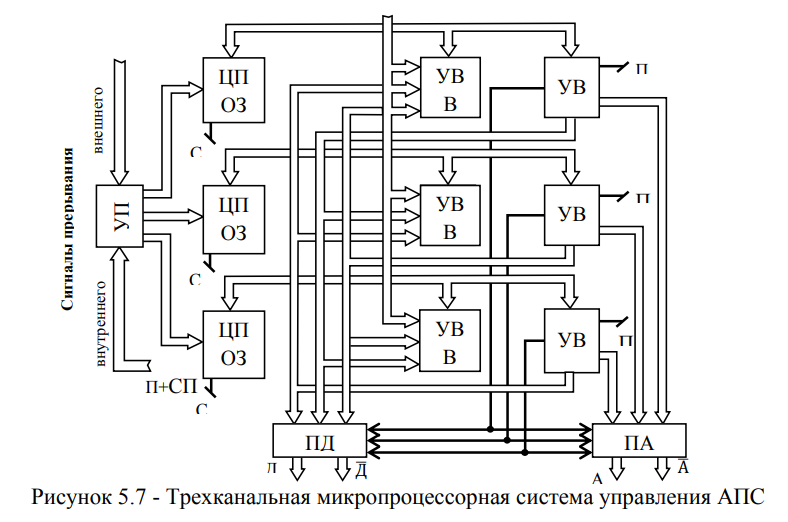
Трехканальная микропроцессорная система состоит из трех независимых микроконтроллеров с общим устройством управления прерываниями УП, преобразователями данных ПД и адресов ПА (Д и А — данные и адреса, Д и А — инвертируемые данные и адреса). Каждый микроконтроллер содержит центральный процессор ЦП, оперативное ОЗУ и постоянное запоминающие устройства ПЗУ, устройства ввода УВв и вывода УВ данных. Микроконтроллеры работают по одинаковым программам асинхронно, что объясняется наличием в каждом из них — собственного тактового генератора. Синхронизация выполняется при запуске каждой программы, к которой переходят по общему сигналу внешнего прерывания СП. При этом, все другие сигналы прерывания блокируются.
По окончании обработки одной программы микроконтроллер переходит в режим ожидания, снимая внутреннюю блокировку прерываний. Если, по крайней мере, два из трех микроконтроллеров находятся в режиме ожидания, то логическим сложением сигналов СП снимается и внешняя блокировка прерываний. В дальнейшем прерывания обрабатываются в соответствии с их приоритетами. Для запуска программ, не связанных с внешним прерыванием, микроконтроллеры самостоятельно вырабатывают сигналы внутреннего прерывания П.
Результаты обработки данных сравниваются на уровне программного обеспечения. При этом, для синхронизации микроконтроллеров служат сигналы СП. Затем микроконтроллеры сравнивают собственные результаты с полученными от других микроконтроллеров. При их совпадении выполняется внутреннее прерывание. В противном случае дальнейшая обработка данных останавливается.
Повреждение одного канала приводит к реконфигурации системы — вместо принципа «2 из 3» в ней реализуется принцип «2 из 2». При этом отключается поврежденный канал, и выдается сигнал тревоги. Подключение этого канала возможно только после ремонта и ввода в его память необходимой информации, благодаря чему обеспечивается возможность бесперебойного перехода системы в состояние полной исправности. В случае повреждения двух и более каналов, система полностью отключается, и включается аварийная сигнализация.
Микропроцессорные системы, имеющие более трех каналов (более трех параллельно работающих МС), строятся аналогично.
Системы с избыточностью могут обеспечить обнаружение подавляющего большинства ошибок, однако класс необнаруженных программных ошибок остается, поскольку обе МС выполняют одну и ту же программу. Поэтому надежные программные средства обнаружения ошибок для системы с избыточностью столь же необходимы, как и для всякой другой.
В зарубежных устройствах ЖАТ [132-134] применяют микропроцессорные системы с помехозащитными свойствами, в которых использован принцип пространственно-временного резервирования. В такую систему входят две микроЭВМ — действующая и находящаяся в «горячем» резерве, в которых используют два совершенно различных варианта А и В программы с диаметрально противоположной организацией структуры данных. В случае несовпадения результатов работы по программам А и В или другого отказа, блок сравнения, состоящий из элементов с безопасным отказом, отключается логическим устройством от действующей микроЭВМ и подключается к «горячему» резерву. Система из двух микроЭВМ, в которой предусмотрены два варианта программы, по сравнению с системой также из двух ЭВМ, но построенной по принципу «2 из 2», имеет большую продолжительность обработки информации, но обладает более высокой надежностью. На практике чаще всего используются системы, построенные по рассмотренным двум принципам. Для двух разных видов резервирования в настоящее время выработаны различные способы проверки программного обеспечения системы. Более тщательной проверки требует одновариантная программа, применяемая в системе с мажоритарной логикой «2 из 3», так как программные ошибки в процессе функционирования системы не выявляются. Стоимость проверки такой программы в 3-5 раз дороже, чем описание функций системы и составление программы. Что касается двухвариантной программы, то микропроцессорная система может выявить ошибки в этой программе только при условии, что ошибки в вариантах программы неодинаковые.
Разработка принципа извещения о приближении и направлении
движения поездов по переезду
Повысить безопасность движения на железнодорожных переездах возможно за счет обеспечения водителей транспортных средств, ожидающих проследование поездов по многопутному переезду, информацией о движении одного или двух одновременно следующих поездов по путям через переезд. Необходимость установки таких указателей диктуется и зарубежным опытом (Япония, ФРГ, Франция и др.). Очевидно, что новая технология работы переездной сигнализации с информацией о движении поездов будет во многом способствовать правильной оценке водителями транспортных средств дорожной обстановки на переезде, а нетерпеливых и слишком ретивых из них заставит задуматься, стоит ли рисковать.
В главах 1, 2 показано, что аварийность на переездах связана также с отсутствием информации у водителей автотранспортных средств информации о направлении движении поездов к переезду. Эта информация важна особенно на многопутном переезде, поскольку существует опасность въезда АТС на переезд в момент горения запрещающего сигнала светофора и освобождения переезда поездом, следующим по ближнему к АТС пути, в то время, как по второму, дальнему по отношению к АТС пути, к переезду в этот момент приближается другой поезд. Такая ситуация может произойти из-за отсутствия у водителя информации о следовании поезда по дальнему пути, закрытому от водителя автотранспорта первым поездом, следующим по ближнему к автотранспорту пути, и привести к серьезным дорожно-транспортным происшествиям с человеческими жертвами.
На рис. 5.8 представлена структурно-функциональная схема разработанного автором устройства извещения водителей АТС о приближении и направлении движения поездов по переезду [135], реализующего алгоритм «дружелюбной» автоматической переездной сигнализации, описанной выше.
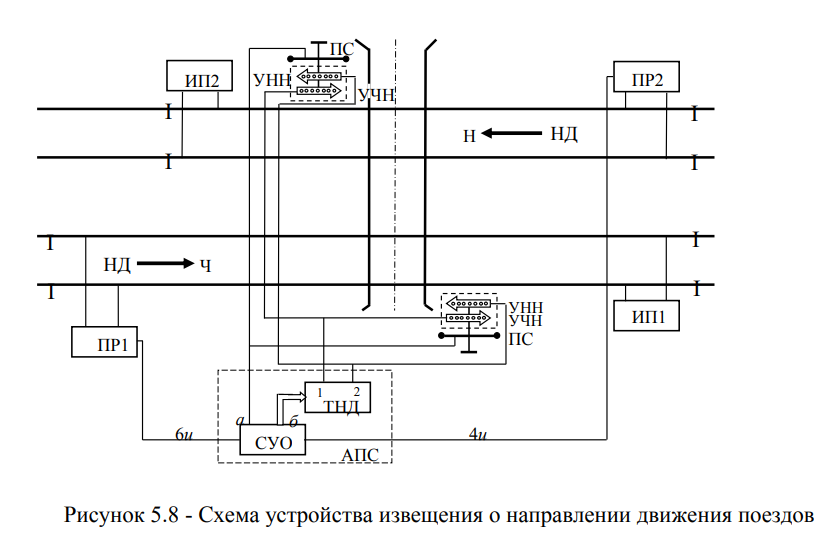
Рассмотрим принцип функционирования устройства с компонентой извещения о направлении движения поездов через переезд. В исходном состоянии АПС, до приближения поездов к УП к переезду (ПР1, ПР2), отключена, и табло направлений движения (ТНД), и красные огни переездных светофоров ПС погашены.
При вступлении поезда на четный УП выключается ПР1, и по цепи извещения 6, и в схему СУО поступает информация о приближении поезда к переезду. На выходе «а» СУО появляется напряжение, включающее красные огни на переездных светофорах ПС. Одновременно на выходной шине «б» СУО появляется информация о приближении поезда с четного направления, и по сигналу со специализированного выхода «1» четного направления ТНД с двух сторон переезда загораются ярко красные светодиодные стрелки указателей движения поезда по переезду световых табло УЧН четного направления движения поездов.
В случае отсутствия встречного поезда в нечетном направлении указатели на световых табло направления движения поезда не горят.
Если в момент следования поезда по переезду в четном направлении на УП нечетного направления Н вступает поезд, то по цепи извещения нечетного
направления 4 и в СУО поступает информация о поезде, и, соответственно, на выходной шине «б» СУО появляется информация об этом, и ТНД, по информации со специализированного выхода нечетного направления «2» на обеих сторонах переезда, включает ярко красные светодиодные стрелки указателей световых табло УНН нечетного направления движения поездов.
После проследования поездов по переезду и освобождения УП Ч и Н, схемы приводятся в исходное состояние, и стрелки на световых табло УЧН и УНН направления движения поездов гаснут. При следовании поезда в нечетном направлении и появлении поезда в четном направлении, алгоритм работы устройства аналогичен, только в начале загораются стрелки световых табло направлений движения поездов УНН, а затем световых табло УЧН.
Чтобы повысить безопасность движения транспортных средств на переездах и создать условия для перевода охраняемых переездов в неохраняемые, необходимо совершенствовать устройства обнаружения препятствий, автоматически управляющие заградительной сигнализацией. Эти устройства, работающие в разных электронных системах, по принципу действия близки между собой. Во Франции применяют устройства, которые построены на микроволновой (СВЧ) технике, осуществляющей локацию переезда на частоте 8-12 ГГц. Передающие и приемные блоки устанавливаются друг против друга, закрепленными на брусьях шлагбаумов или на специальных стойках таким образом, чтобы в их «поле зрения» находилась зона над поверхностью переезда. Поперечная локация переезда начинается через 22 с после включения предупредительной сигнализации (7 с — вызов, 9 с — опускание въездного шлагбаума, 6 с — опускание выездного шлагбаума).
Во Франции, США и ФРГ [136, 137] на переездах используют устройства обнаружения препятствий, созданные на основе оптических квантовых генераторов (лазеров). Информация, поступившая в приемники с датчиков, преоб¬разуется в сигналы управления шлагбаумами, переездными и заградительными светофорами. Блок формирования сигналов, расположенный около переезда, рассчитан на подключение до пяти лазерных комплектов. Когда переездные шлагбаумы открыты, приемники работают в режиме дежурного приема, а передатчики обесточены. Для предохранения от загрязнения все оптические элементы прикрыты защитными крышками. При закрытии шлагбаумов в то время, когда переезд занят, передатчики приходят в рабочее состояние после контроля подачи приемниками сигналов занятости, а защитные крышки открываются. Освобождение переезда приведет к тому, что подача сигнала занятости прекратится, а примерно через 2 с отключится передатчик, и закроются защитные крышки.
Для дистанционного контроля межшлагбаумной зоны эффективно использование видеокамер, смонтированных над путями. Очевидно, что автоматизированное управление устройствами и диспетчерский контроль, включая визуальный по монитору, обеспечивают высокую безопасность движения поездов, автотранспорта и пешеходов на переездах.
Выводы по пятой главе
- Разработанный в работе алгоритм управления АПС с функцией вычисления координаты и скорости поезда со стратегическим и оперативным идентификатором и настраивающим уравнение вычислителя звеном, реализован трехуровневой структурной схемой, состоящей из блоков: безопасных интерфейсов, предварительной обработки и микропроцессорного вычислительного устройства с элементом сравнения вычисленного значения координаты поезда с реальной координатой.
- Разработанные три варианта микропроцессорных устройств управления АПС с новым алгоритмом функционирования — двухканальное устройство с общим процессором, двухканальная с нагруженным резервом и трехканальное устройство с принципом мажоритарной логики «2 из 3» позволяют создавать системы управления АПС с требуемой надежностью для различных участков железных дорог, имеющих различные потоки поездов и автотранспорт.
Проведенные в диссертационной работе исследования позволили сформулировать следующие основные выводы. - Проанализированы причины высокой аварийности на железнодорожных переездах, которые показали, что основными влияющими факторами нарушения безопасности являются: длительное время закрытого для движения автотранспорта переезда; отсутствие оперативной информации для водителей автотранспорта о меняющейся ситуации на переезде (время до появления запрещающего огня на переездном светофоре, а также о время до появления поезда на переезде и открытия переезда для движения автотранспорта; поездная ситуация на переезде, когда поезд, следующий по ближнему пути, закрывает водителям видимость поездов, следующих по другим путям).
- Показано, что организационные и технические мероприятия способствуют увеличению безопасности и сокращению аварийности, но, с увеличением скорости и веса поездов, в соответствии с существующим жестким алгоритмом управления, увеличивается длина участка приближения, и при движении поездов с малой скоростью время ожидания открытия переезда увеличивается до 30-40 минут, а это приводит к тому, что водители, игнорируя запрещающий огонь переездного светофора, начинают движение, что отрицательно сказывается на безопасности на переездах, технологическом цикле перевозочного процесса.
- Разработана методика селекции и исследования информативности первичных признаков, позволяющая формировать признаковое множество, как вне системы определения координат, так и с использованием уравнения координат поезда. В результате оценки информативности сформировано множество признаков из комплексных амплитуд напряжений и токов на входе рельсовой линии.
- Обоснованы вид и сложность уравнения вычисления координат поезда на основе полинома Колмогорова — Габора, разработана методика самонастройки уравнения, основанная на коррекции ошибок вычисления местоположения поезда, сравнением вычисленного значения координаты с реальной, с последующей минимизацией результирующей ошибки рекуррентной вычислительной процедурой корректировки коэффициентов уравнения.
- Проведены исследования возможностей алгоритма адаптивной самонастройки на двух примерах реализации уравнения вычислителя координат поезда и выявлено, что разработанный рекуррентный алгоритм корректировки уравнения позволяет обеспечить минимизацию ошибки. Получены результаты моделирования самонастройки, которые показывают, что увеличение ошибки вычисления координаты до 13% (260 м), из-за изменения наиболее влияющего параметра 20 на 5%, компенсируется корректировкой коэффициентов уравнения вычисления координаты до минимальной погрешности- 2,35% (47 м).
- Создана и защищена патентом структурная схема микропроцессорной инвариантно — измерительной системы управления, рассматриваемая как частный случай адаптивной системы с идентификатором, состоящая из основной (информационной) системы, звена управления и канала самонастройки; а в качестве корректируемой модели использовано уравнение координаты поезда.
- Произведена оценка эффективности разработанного устройства, которая показала, что максимальное время ожидания водителями открытия переезда после проследования поезда не превышает 3,2 минуты. Разработано цифровое табло, позволяющее оперативно информировать водителей о поездной ситуации на переезде, а также о времени приближения поездов к переезду.
Список литературы
- Сапожников, В.В Надежность систем железнодорожной автоматики, телемеханики и связи / В.В. Сапожников, Вл. В. Сапожников, В.И. Шаманов. — М: Маршрут, 2003. — 263 с.
- Лисенков, В.М. Безопасность технических средств в системах управления движением поездов / В.М. Лисенков. — М.: Транспорт, 1985. — 83 с.
- Шалягин, Д.В. Надежность и безопасность железнодорожной автоматики и телемеханики / Д.В. Шалягин, И.Б. Шубинский // Автоматика, связь и информатика. — 2005. — №2. — С. 23-26.
- Федорчук, А.Е. Микропроцессорные технологии управления, диагностирования и технического обслуживания / А.Е. Федорчук, А.А. Сепетый // Автоматика, связь, информатика. — 2004. — №6.
- Сепетый, А.А. Измерительно-вычислительные средства в системе автоматизации диагностирования и контроля устройств ЖАТ: учебник для вузов железнодорожного транспорта / А.А. Сепетый, В.В. Кольцов, В.С. Прищепа, Ю.В. Снитко, А.Е. Федорчук, В.Н. Иванченко, Е.А. Гоман. — Ростов н/Д: РГУПС, 2009. — 406 с.
- Сапожников, В.В. Методы построения безопасных микроэлектронных систем железнодорожной автоматики / В.В. Сапожников, Х.А. Христов, Д.В. Гавзов; под ред. Вл. В. Сапожникова. — М.: Транспорт, 1995. — 272 с.
- Смит, Д. Функциональная безопасность (Простое руководство по применению стандарта МЭК 61508 и связанных с ним стандартов) / Д. Смит, К. Симпсон. — М.: Технологии, 2004.- 206 с.
- Патент RU 2651379 Устройство управления автоматической переездной сигнализацией / Герус В.Л., Тарасов Е.М., Железнов Д.В. — заявл. 11.04.2016г., опубл. Б.И. 2018г., №11.
- Переборов, А.С. Телеуправление стрелками и сигналами: Учебник для вузов ж.-д. транспорта / А.С. Переборов, А.М. Брылеев и др. — М.: Транспорт, 1981. — 390 с.
- Аркатов, В.С. Рельсовые цепи. Анализ и техническое обслуживание. / В.С. Аркатов, Ю.А. Кравцов, Б.М. Степенский. — М.: Транспорт, 1990. — 295 с.
- CENELEC EN 50128: Railway Applications — Communications, signaling and processing systems — Software for Railway Control and Protection Systems. 2000. Применения на железнодорожном транспорте — Программное обеспечение для систем управления и обеспечения безопасности на железнодорожном транспорте.
- CENELEC EN 50129: Railway Applications — Safety-related Electronic Systems for Signaling. 2000. Применения на железнодорожном транспорте — Электронные системы железнодорожного управления и защиты, связанные с безопасностью.
- IEC 62425(2007) Железные дороги. Системы связи, сигнализации и обработки данных. Безопасность электронных систем сигнализации.
- IEC 61508: 1-6. Functional safety of electrical / electronic / programmable electronic safety — related systems. 1998 — 2000. Функциональная безопасность электрических / электронных / программируемых электронных систем безопасности.
- Куммер, П.И. Электронные системы автоматики на зарубежных железных дорогах / П.И. Куммер, Т.В. Коптева. — М.: Транспорт, 1990. — 118 с.
- Бестемьянов, П.Ф. Методы повышения безопасности микропроцессорных систем интервального регулирования движения поездов : дис. … докт. техн. наук : 05.22.08 / Петр Филимонович Бестемьянов. — М., 2001. — 324 с.
- Герус, В.Л. Использование бесконтактных датчиков Холла в безопасных интерфейсах железнодорожной автоматики / В. Л. Герус, Д. В. Железнов, Е. М. Тарасов // Наука и образование транспорту: междунар. науч.-практ. конф. — Самара, 2017. — Т. 1. — С.208-212.
- Цымбал, А.Л. Структура выходного элемента устройств связи микроЭВМ с объектами управления и контроля / А.Л. Цымбал // Труды ОМИИТа. — 1987. — С. 64-67.
- А.с. СССР 1017570 Устройство для включения исполнительного реле железнодорожной автоматики / Дрейман О.К., Гавзов Д.В., Бодров А.А. — МКИ B61L 23/16.
- А.с. СССР 1588615 Мажоритарное устройство управления включением исполнительного реле железнодорожной автоматики и телемеханики / Гавзов Д.В., Илюхин М.В., Сосновская Е.Г. — МКИ B61L 19/14.
- Наседкин, О.А. Методы повышения безопасности микропроцессорных систем железнодорожной автоматики : дис. … канд. техн. наук : 05.22.08 / Олег Андреевич Наседкин. — Санкт-Петербург, 1993. — 201 с.
- Okomura, J. Electronic Interlocing to be Tried in Japan / J. Okomura // Japanese Railway Signaling Engineering. — 1980. — №12. — P. 77-81.
- Yagi, M.A. Fail-safe digital Data Transmission System / M.A. Yagi // Japanese Railway Signaling Engineering. — 1981. — № 2. — P. 12-16.
- Lohman, H.I. Sicherhet von Mikrocomputern fuer die Eisenbahnsignaltechnik / H.I. Lohman // Elektronische Rechenanlagen. — 1980. — №2. — P. 58-63.
- Герус, В.Л. Общие принципы построения и структура системы непрерывного определения координаты поезда на участке приближения к переезду [Текст] / В.Л. Герус, Е.М. Тарасов, А.Е. Тарасова // Молодежная наука в XXI веке: традиции, инновации, векторы развития: материалы междунар. науч.-практ. конф. Оренбург, 2018. — Ч. 1.
- Кугамаи, Т. Принципы построения электронных систем управления переездами / Т. Кугамаи // Quarterly Reports of Railway Technical Research Institute. — №1. — С. 13-14.
- Лейперт, В. Применение электронных систем на железнодорожном транспорте / В. Лейперт // Zev-Glasers Annalen. — 1985. — №1. — С. 9-16.